

Method for building multi-classification support vector machine classifier based on Bhattacharyya distance and directed acyclic graph
A directed acyclic graph and support vector machine technology, applied in the field of pattern recognition, can solve the problems of inability to use different prior information of separability between categories, large amount of calculation, slow training speed, etc., to achieve good learning effect, The effect of fast calculation and reduced data input
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
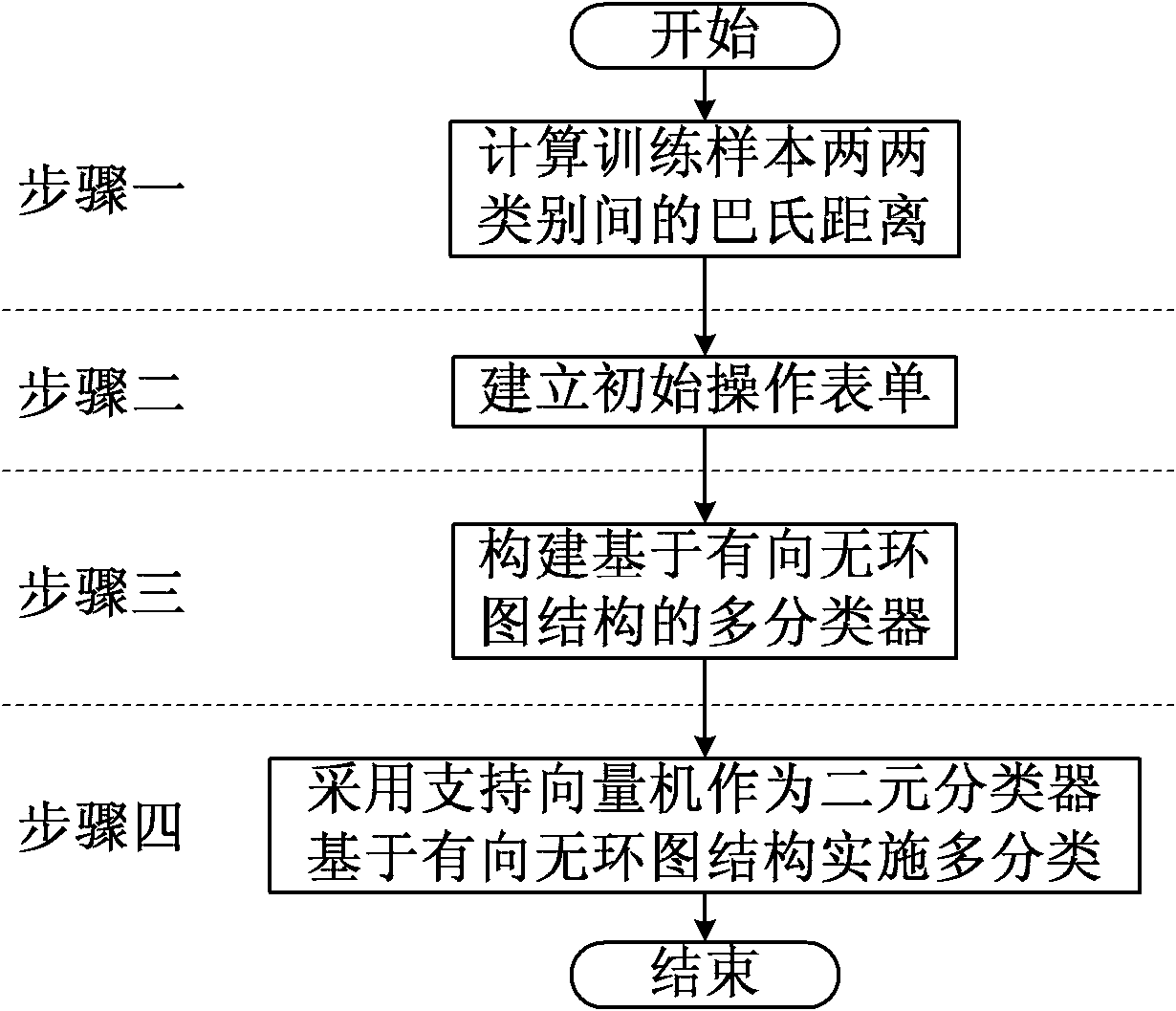
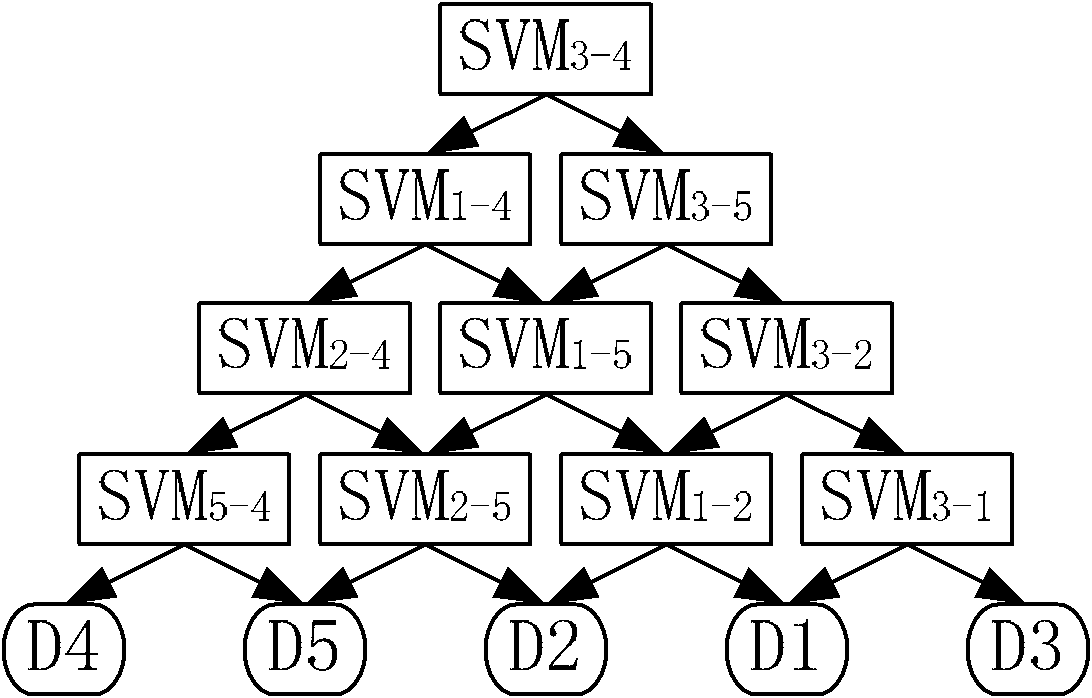
[0029] Specific implementation mode one: the following combination figure 1 This embodiment is described. In this embodiment, a multi-classifier based on a directed acyclic graph structure is assisted by Bhattacharyian distance, so that categories with relatively large differences in separability are prioritized for discrimination, and the topology is redundant. The same The samples of the category can have different classification paths, and this path shunting reduces the amount of data input to the sub-classifier, making the calculation faster and the learning effect better.
[0030] The purpose of the present invention is achieved through the following technical solutions: estimate the separability distribution properties between various training data by calculating the Bhattacharyachian distance, establish an initial operation form, arrange all possible categories of the sample in a certain order in the form, and re- Combine the node order of the directed acyclic graph, an...
specific Embodiment approach 2
[0060] Specific implementation mode two: this implementation mode sets forth a specific embodiment of the present invention in conjunction with the servo motor system identification data in UCI (University of California, Irvine) machine learning public database:
[0061] In the servo motor system data set of the UCI machine learning public database, the recorded output value is the adjustment time, that is, the time for the system to respond to the step command and run in place when the system is in a set position. According to the time value, it can be equal It is divided into 5 categories, which are described by four attributes: motor type, guide rail thread type, position loop proportional gain and speed loop proportional gain. The data set contains 167 samples, 84 of which are taken as training samples, and the remaining 83 as a test sample.
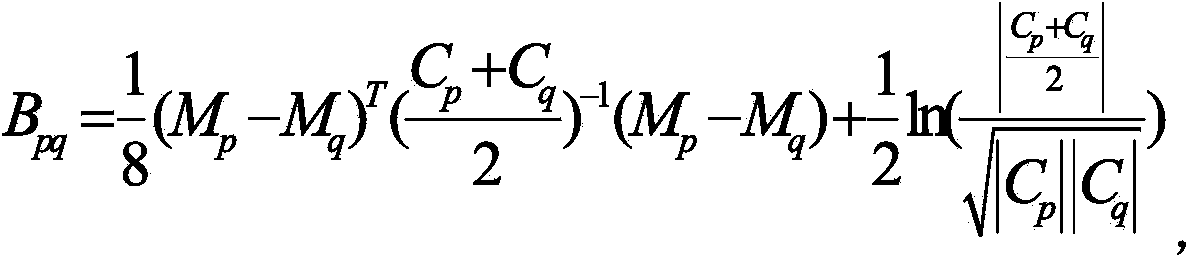
[0062] Execution step 1: For the 5-category servo motor system objects, calculate the Bhattacharyachian distance between any two ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More