

Indoor positioning method and device
An indoor positioning and location information technology, applied in the field of navigation, can solve problems such as accumulation of positioning errors, weak signals, and affecting positioning accuracy, and achieve the effect of improving positioning accuracy and rigorous positioning process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
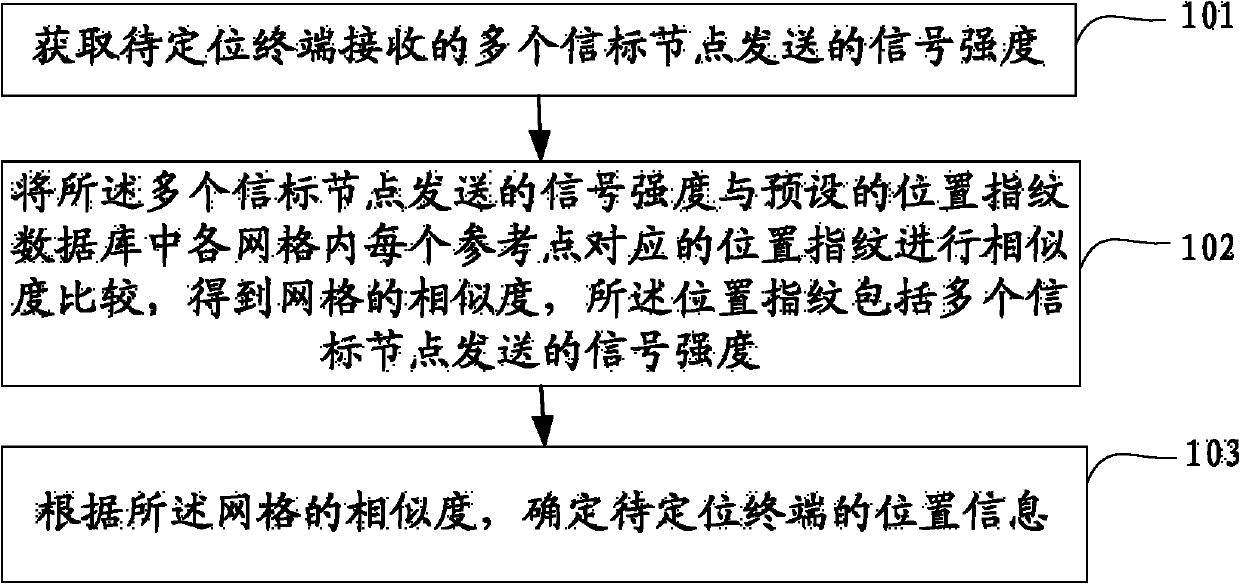
[0054] see figure 1 , this embodiment provides an indoor positioning method, specifically including:
[0055] Step 101: Obtain the signal strengths sent by multiple beacon nodes received by the terminal to be positioned;
[0056] Step 102: Compare the similarity between the signal strengths sent by the multiple beacon nodes and the position fingerprints corresponding to each reference point in each grid in the preset position fingerprint database to obtain the similarity of the grids, the position Fingerprints include signal strengths sent by multiple beacon nodes;
[0057] Step 103: Determine the location information of the terminal to be positioned according to the similarity of the grid.
[0058] In the method provided in this embodiment, the location of the terminal to be positioned is determined by comparing the received signal strengths sent by multiple beacon nodes with the location fingerprints corresponding to multiple reference points in the grid, and the similarit...
Embodiment 2
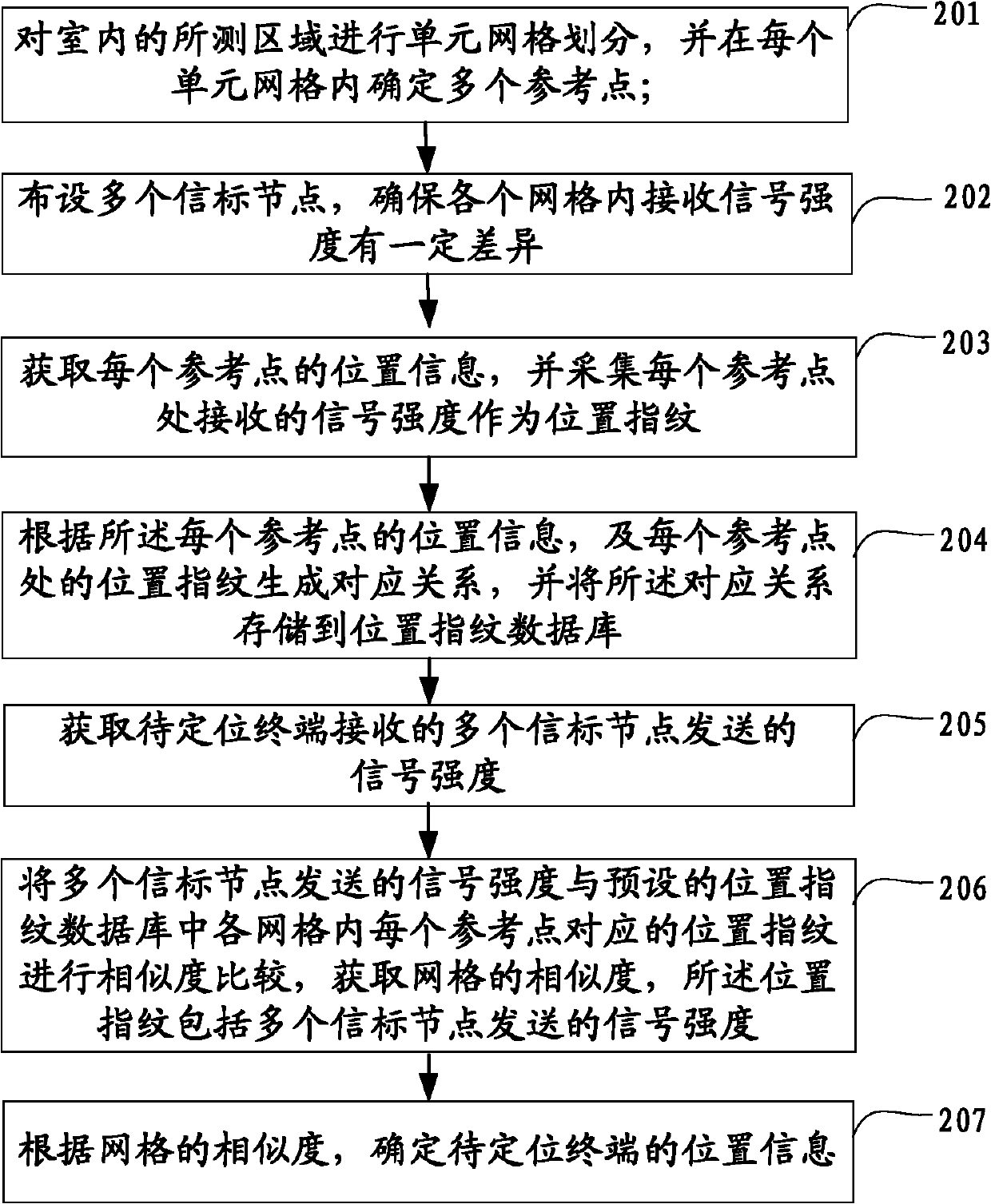
[0060] see figure 2 , this embodiment provides an indoor positioning method, wherein steps 201-204 are offline sampling stages, and steps 205-207 are online positioning nodes, the indoor positioning method specifically includes:
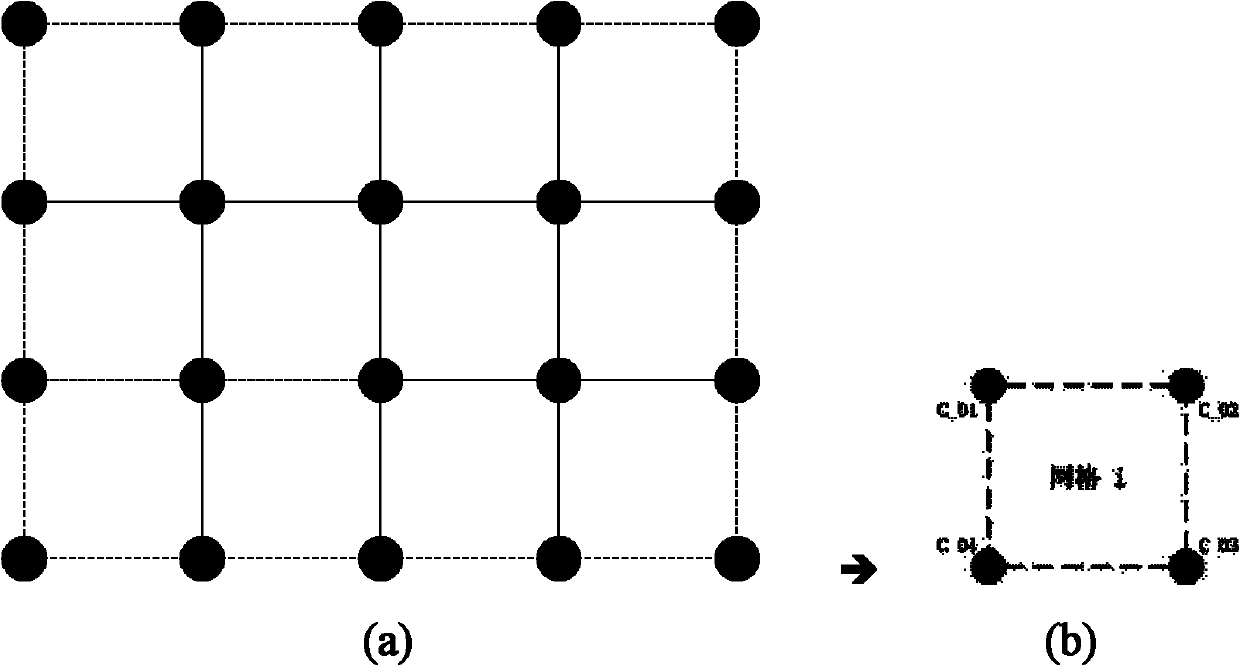
[0061] Step 201: Carry out unit grid division for the measured indoor area, and determine multiple reference points in each unit grid;
[0062] For this step, in this embodiment, the area with positioning requirements in the building is referred to as the measured area, and the measured area is divided into unit grids.
[0063] In this embodiment, a positioning area is required, which may be a working room, a lounge, a bathroom, a hall, a corridor, and a stair area between floors. This implementation can perform corresponding mesh division according to different positioning accuracy requirements: when the positioning accuracy requirements are low, that is, regional positioning, such as studios, lounges, bathrooms, etc., the entire room can be divid...
Embodiment 3
[0104] see Figure 6 , an embodiment of the present invention provides an indoor positioning device, the device includes:
[0105] Received signal strength module 301, configured to obtain the signal strength sent by multiple beacon nodes received by the terminal to be positioned;
[0106] Obtaining a grid similarity module 302, configured to compare the signal strengths sent by the plurality of beacon nodes with the position fingerprints corresponding to each reference point in each grid in the preset position fingerprint database to obtain a grid The similarity of the position fingerprint includes the signal strength sent by multiple beacon nodes;
[0107] The determining position information module 303 is configured to determine the position information of the terminal to be located according to the similarity of the grid.
[0108] Wherein, the obtaining grid similarity module 302 specifically includes:
[0109] A traversal unit 3021, configured to traverse the location ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More