

System time offset-aided multimode satellite navigation method
A multi-mode satellite and system time technology, applied in the field of satellite navigation, can solve problems such as unreasonable geometric precision factor, performance degradation of user-level processing methods, and increased geometric precision factor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
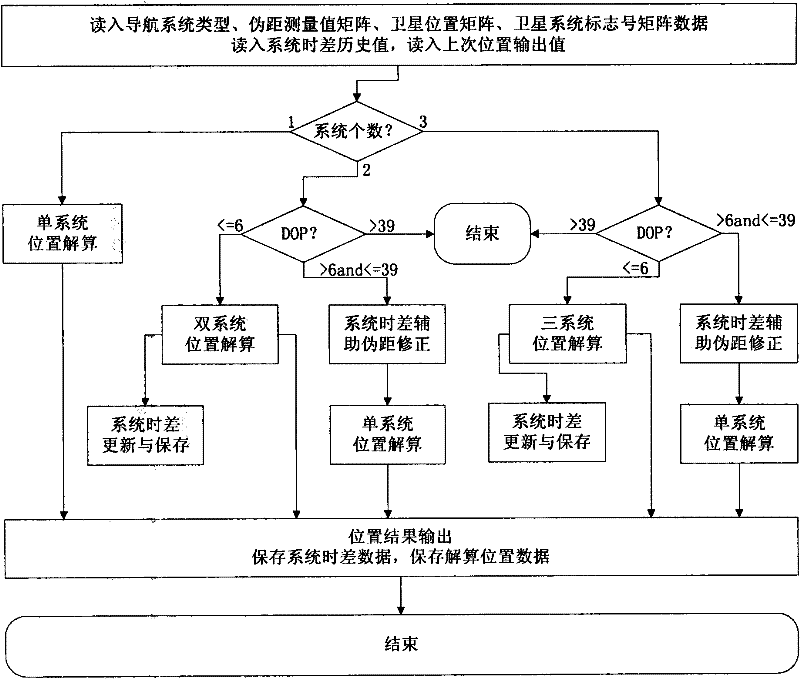
[0071] figure 2 It is the overall design of the system time deviation assisted multi-mode satellite navigation method of the present invention.
[0072] Step A1, start the algorithm, input the measurement time, read in the navigation system type, pseudo-range measurement value matrix, satellite position matrix, and read in the system time difference history value and the last calculated position output value from the file saved in the last run of the program .
[0073] Step A2, judging the number of systems;
[0074] If there is only one system, set the time difference correction flag to 1, enter the single system calculation process, calculate the receiver position according to the linear iterative method, and output the position result.
[0075] If there are two systems participating in the calculation, enter the dual system calculation process; according to the dual system calculation rules, first calculate the DOP value, and perform corresponding operations according to...
Embodiment 2
[0078] Embodiment 2: Analysis of system time deviation assisted navigation method
[0079] The main contribution of the system time difference assisted navigation method is to increase the judgment of the DOP value. When the DOP value is reasonable, the system time difference is calculated. When the DOP value is greater than 6, the observation conditions are poor, and the extrapolated value of the system time difference is used as the current system time difference. The difference, the number of unknowns that need to be solved currently is reduced, and the geometric precision factor is optimized by reducing the number of unknowns to be solved to improve the positioning accuracy.
[0080] The feasibility of this method mainly focuses on two aspects: 1) whether the receiver has time to receive enough satellites in a multi-occlusion environment; 2) whether the accuracy of the receiver's time difference extrapolation for the autonomous system can meet the system requirements.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More