

Cylinder series connection elastic driver
A series of elastic and drive technology, applied in the field of drives, can solve the problems of difficulty, increase of drive processing and manufacturing, etc., and achieve the effect of small size, reliable performance and broad application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The present invention is described in more detail below in conjunction with accompanying drawing example:
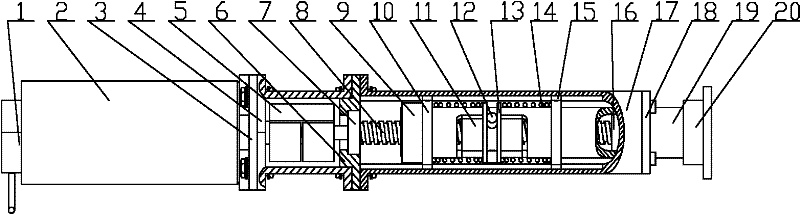
[0018] combine Figure 1~5 , the present invention is a motor-driven elastic driver, the end of the servo motor 2 is fixedly connected to the encoder 1, the other end of the servo motor 2 is fixedly connected to the motor support plate 3 through four screws, and the motor support plate 3 is fixed to the connecting cylinder 4 Connected, the connecting cylinder 4 is fixedly connected with the bearing seat 6, the bearing seat 6 is fixedly connected with the shell 17, the other end of the shell 17 is fixedly connected with the end cover 18, and the output shaft of the servo motor 2 is installed from the inside to the outside. Groove ball bearing 7, leading screw 8, support block 16, nut 11, thrust cylinder 12. The two sides of the thrust cylinder 12 connected with the nut 11 are two spring driving plates 13, and the two sides of the spring driving plate 13 are respec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More