

Single-axis rotation type strapdown inertial navigation system transposition method
A strapdown inertial navigation and inertial navigation system technology, applied in the field of single-axis rotary strapdown inertial navigation system transposition, can solve the problem that the inertial navigation cannot guarantee the full rotation, the rotation error cannot be fully compensated, and the rotation cannot be transferred to the specified position. Location etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0058] Apply this method to a land-use single-axis rotary strapdown inertial navigation system; the gyro accuracy in the inertial navigation system is 0.01° / h, the gyro zero bias is 0.1° / h, and the rotation angular velocity Ω of the strapdown inertial navigation system is 18° / s, the initial directions of the INS and the carrier are both north; the movement process of the carrier is as follows:
[0059] The first step is to turn 90° to the left at a speed of 30° / s and stop for 35s;
[0060] In the second step, turn right 100° at a speed of 25° / s and stop for 25s;
[0061] The third step is to turn right 210° at a speed of 35° / s and stop for 10s.
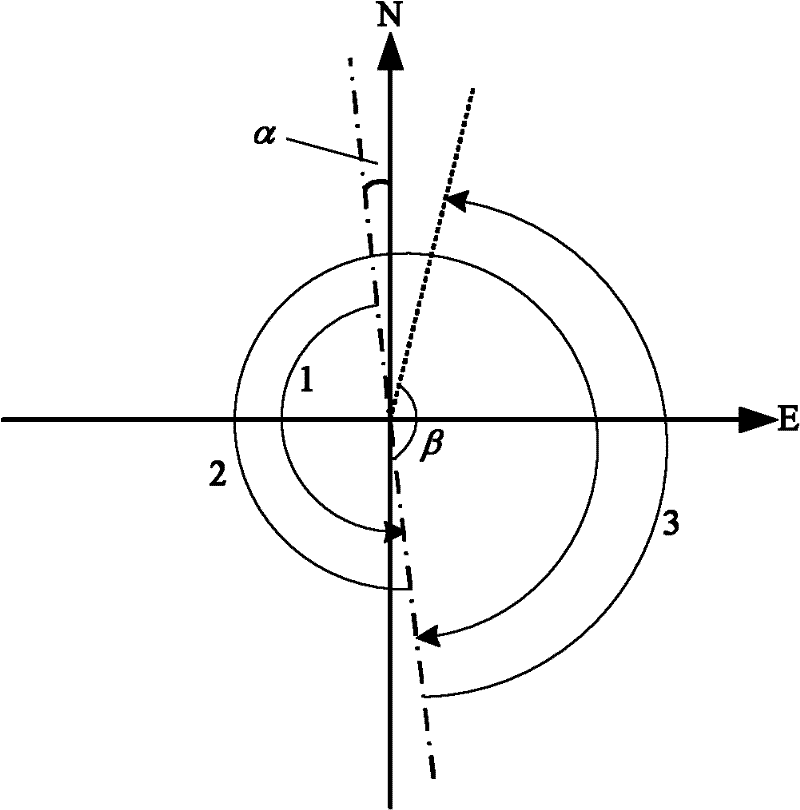
[0062] During the motion of the inertial navigation system, the first three rotation cycles move as follows:
[0063] The three rotation processes in the first rotation cycle are respectively:
[0064] 1) Control the inertial navigation to rotate 180° counterclockwise;
[0065] 2) Control the inertial navigation to rotate 360° cl...
Embodiment 2
[0076] Apply this method to a single-axis rotating strapdown inertial navigation system on water; the gyro precision in the inertial navigation system is 0.01° / h, the gyro zero bias is 0.1° / h, and the rotation angular velocity Ω of the strapdown inertial navigation system is 18° / h s, the initial directions of the INS and the carrier are both north; the movement process of the carrier is as follows:
[0077] The first step is to turn 90° to the left at a speed of 30° / s and stop for 35s;
[0078] In the second step, turn right 100° at a speed of 25° / s and stop for 25s;
[0079] The third step is to turn right 210° at a speed of 35° / s and stop for 10s.
[0080] During the motion of the inertial navigation system, the first three rotation cycles move as follows:
[0081] The three rotation processes in the first rotation cycle are respectively:
[0082] 1) Control the inertial navigation to rotate 180° counterclockwise;
[0083] 2) Control the inertial navigation to rotate 360...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More