

Remote control humanoid robot system based on exoskeleton human posture information acquisition technology
A humanoid robot and human body posture technology, applied in the field of humanoid robot system, can solve the problems of less freedom, simple function and low practicability, and achieve the effects of light wear, increased space application range, and increased accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0035] Device example:
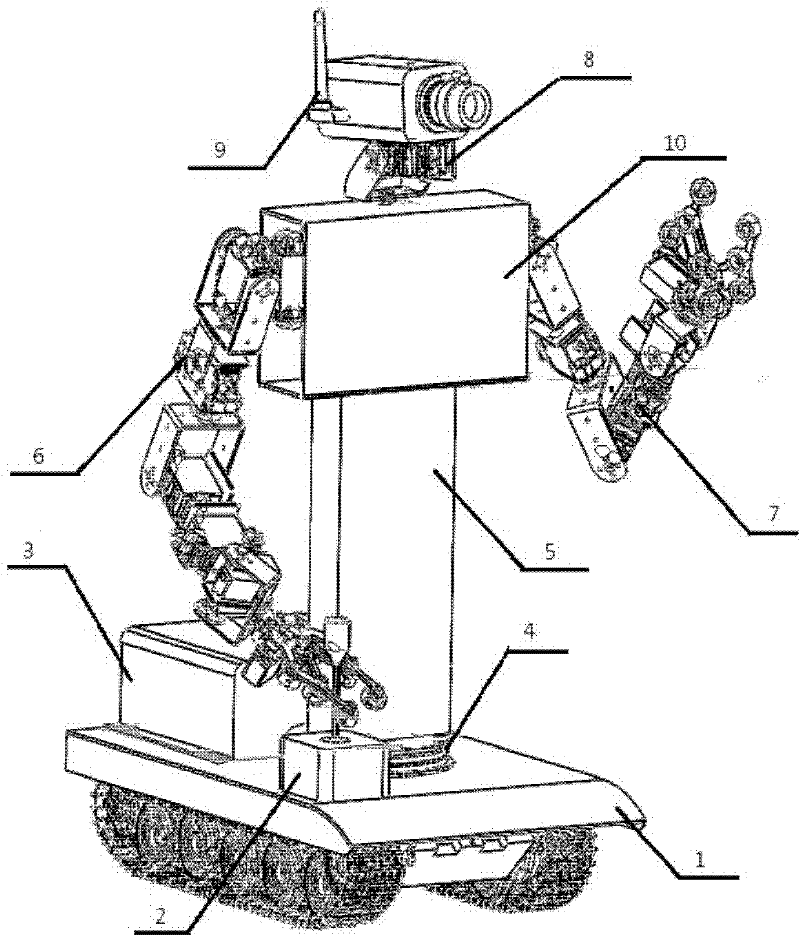
[0036] refer to figure 1 , the present invention provides an overall structure of a crawler-type humanoid robot, comprising: a walking mechanism composed of a crawler chassis 1, a direction control rod 2 and a chassis trunk 3, a turntable 4, a main trunk 5, a right mechanical arm 6, a left mechanical The motion mechanism that arm 7, neck turntable 8, camera 9 and chest cabin 10 form.
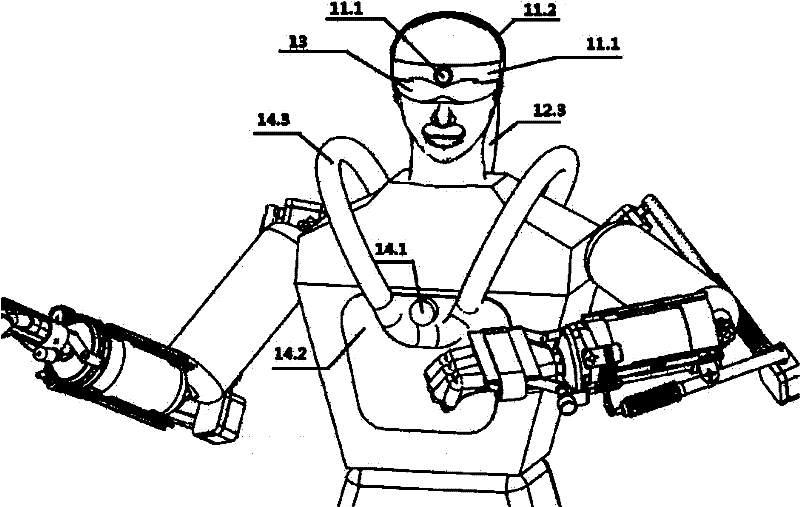
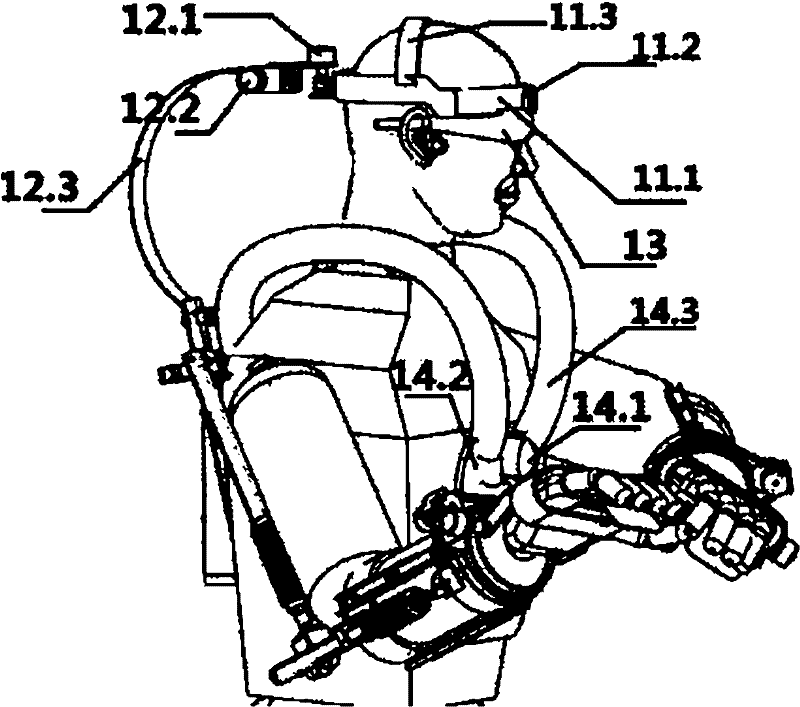
[0037] refer to figure 2 , 3, 4, 5, 6 are schematic diagrams of an exoskeleton type human body posture information collection service of the present invention, including: head immobilizer, head posture collector, video glasses 13, shoulder immobilizer, arm posture collection device, hand gesture collector and back immobilizer. Wherein the head immobilizer is made up of head support 11.1, locking screw 11.2 and overhead support 11.3, and overh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More