

Multi-camera-based multi-objective positioning tracking method and system
A multi-target positioning and multi-camera technology, which is applied in the multi-camera-based multi-target positioning tracking and system field, can solve problems such as tracking influence, homography matrix calculation error, and inability to meet real-time requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
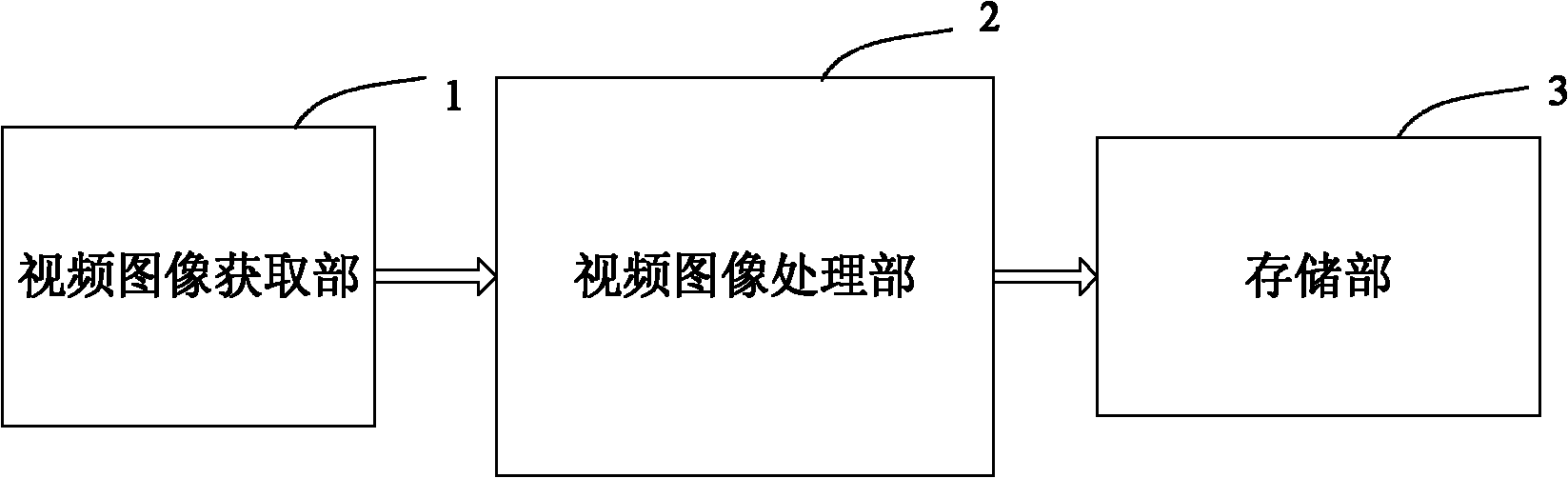
[0046] figure 1 It is a structural block diagram of the present invention, such as figure 1 Shown:
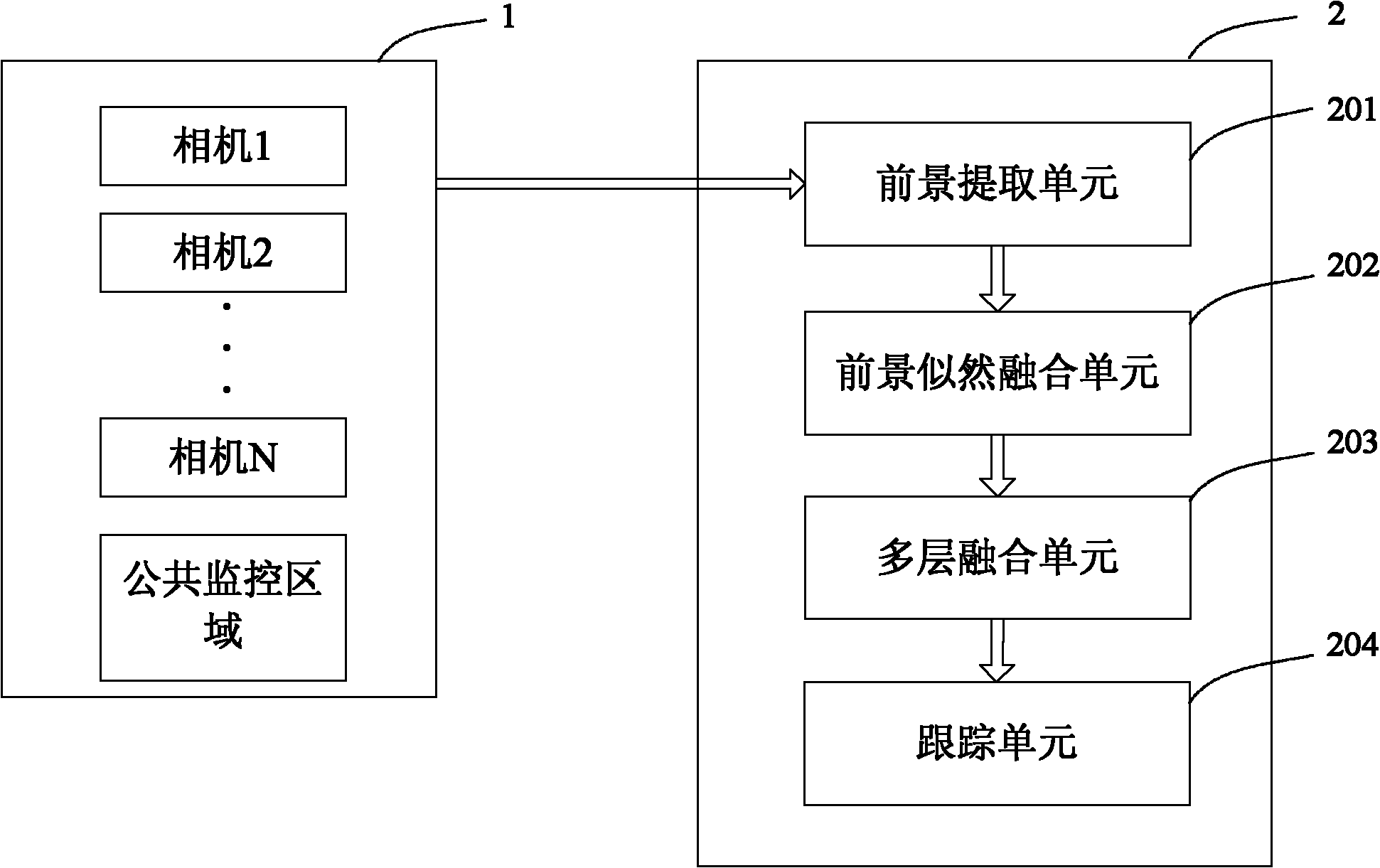
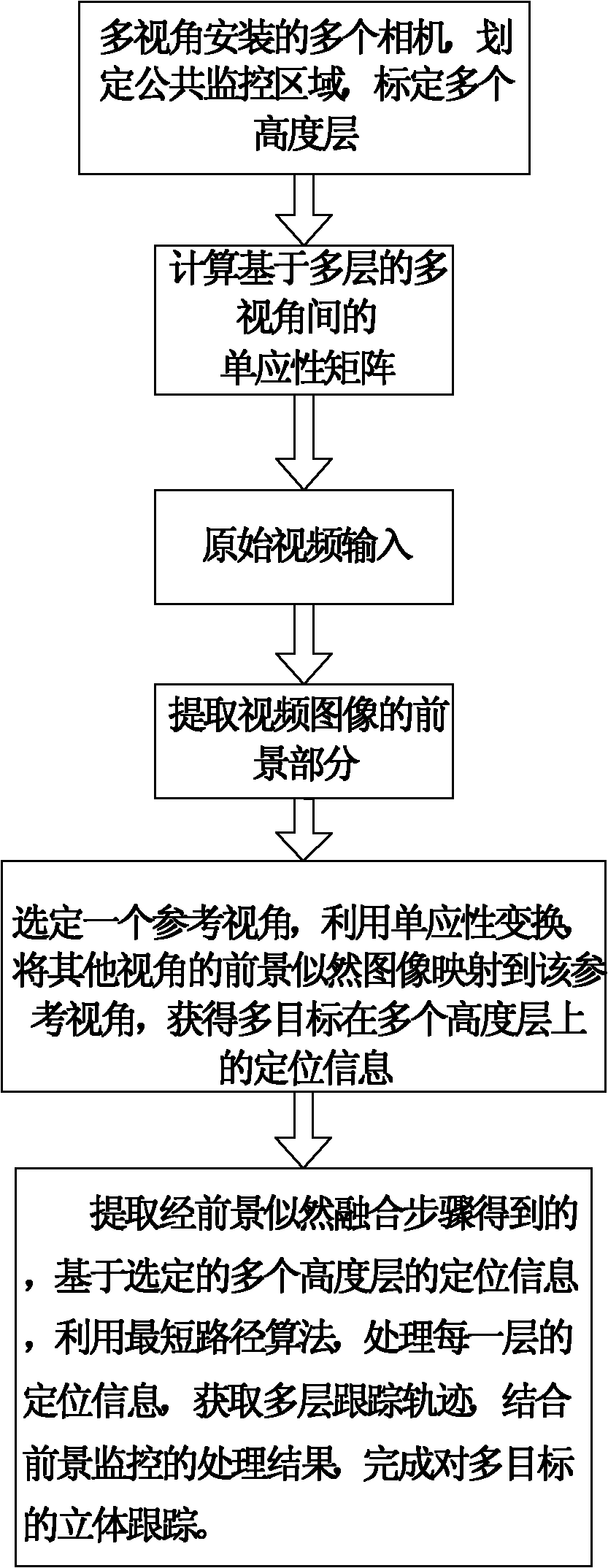
[0047] A multi-camera-based multi-target positioning and tracking system, including an image acquisition unit 1, including a calibrated video surveillance area, that is, setting a common shooting area for multiple cameras, and selecting parallel three-story floors with different heights in a direction perpendicular to the ground , to place benchmarks on each level. The specific implementation steps are as follows: place 4 benchmarks vertically on the ground in the shooting scene, and at the same height, as a preferred implementation, mark the markers with red to facilitate identification by video equipment.
[0048] The storage unit 3 is used for storing the collected data.
[0049] As well as multiple scattered cameras with multiple different viewing angles, in order to ensure the accuracy of video surveillance, the present invention uses more than three video surveillance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More