

Air mouse and method and device for controlling mouse pointer movement
A mouse pointer and air mouse technology, applied in the field of positioning, can solve the problems of slow processing speed, high power consumption, rising cost, etc., and achieve the effect of improving processing speed, moving delicately and smoothly, and reducing power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
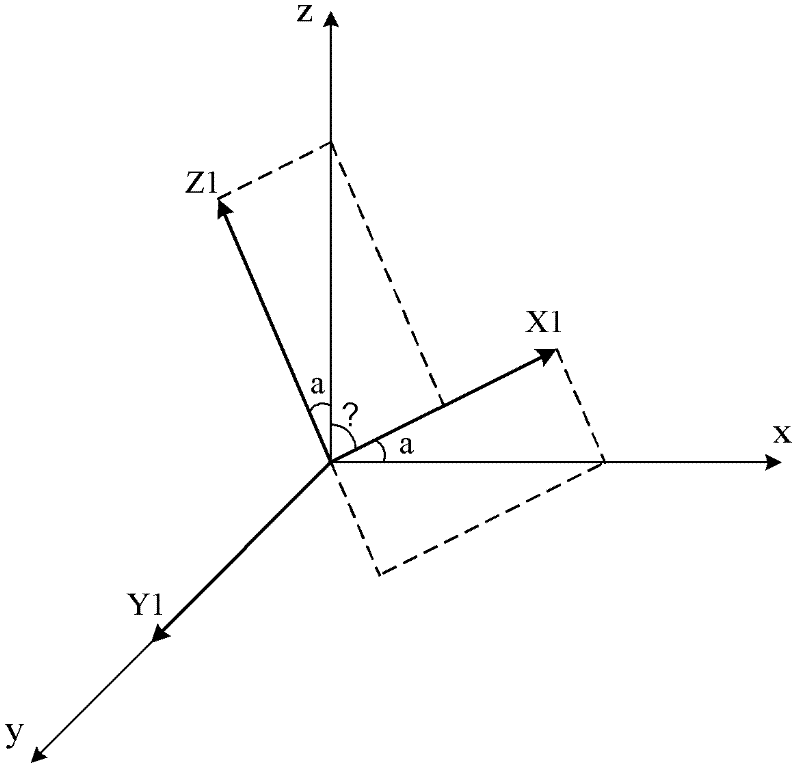
[0068] In this embodiment, the air mouse includes at least one inertial device, and the inertial device includes a gravitational acceleration sensor, further, the gravitational acceleration sensor is a capacitive gravitational acceleration sensor, which includes at least two mutually perpendicular sensitive axes, One of the sensitive axes is perpendicular to the ground plane. During specific implementation, a three-axis gravitational acceleration sensor is generally selected, and the sensitive axis perpendicular to the ground plane is recorded as the z-axis, and the other two sensitive axes are perpendicular to each other and are respectively perpendicular to the z-axis, which are respectively recorded as the x-axis and y-axis. The plane formed by the x-axis and the y-axis is parallel to the ground plane. Since the current requirement of the air mouse is only to realize a two-dimensional coordinate system on the screen, any two of the three axes can be used to meet the require...
Embodiment 2
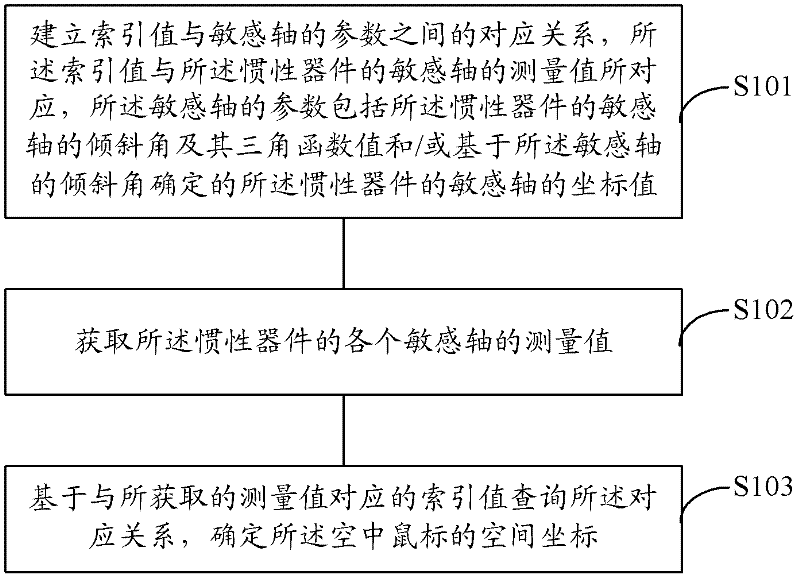
[0134] The method for controlling the movement of the mouse pointer provided in this embodiment is based on the method for controlling the movement of the mouse pointer described in the first embodiment, and the difference between it and the first embodiment is that the method for determining the spatial coordinates of the air mouse is different. can be combined image 3 , in this embodiment, the parameter of the sensitive axis in step S101 includes the coordinate value of the sensitive axis of the inertial device determined based on the inclination angle of the sensitive axis. In order to enable the determination of the space coordinates of the air mouse in step S103 to realize its positioning faster, in this embodiment, it is considered to directly establish the index value and the inertial device determined based on the tilt angle of the sensitive axis The correspondence between the coordinate values of the sensitive axes. Of course, the corresponding relationship betwee...
Embodiment 3
[0141] On the basis of Embodiment 1 or Embodiment 2, the inventor considers that the motion of the air mouse not only includes acceleration motion, deceleration motion or uniform motion, but also includes its motion tendency (track), and the motion tendency includes linear motion and non-linear motion. Linear motion, if it can be judged that the motion trend of the air mouse is linear motion, then by reducing the report rate of the air mouse, the power consumption can be reduced without affecting the smoothness of the mouse pointer movement track.
[0142] Therefore, in this embodiment, the method for using the air mouse to control the movement of the mouse pointer further includes: identifying the movement trend of the air mouse with a plurality of consecutive index values obtained after judging that the sensitive axis is stable, if the movement trend is a straight line movement, Then reduce the reporting rate of the air mouse. Specifically, the identification of the moveme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More