

Dual-threshold detecting system and method for ground contact force of polypod robot
A multi-legged robot and detection system technology, applied in the field of dual-threshold detection systems, can solve the problems of expensive pressure sensors, unstable contact force, large size, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
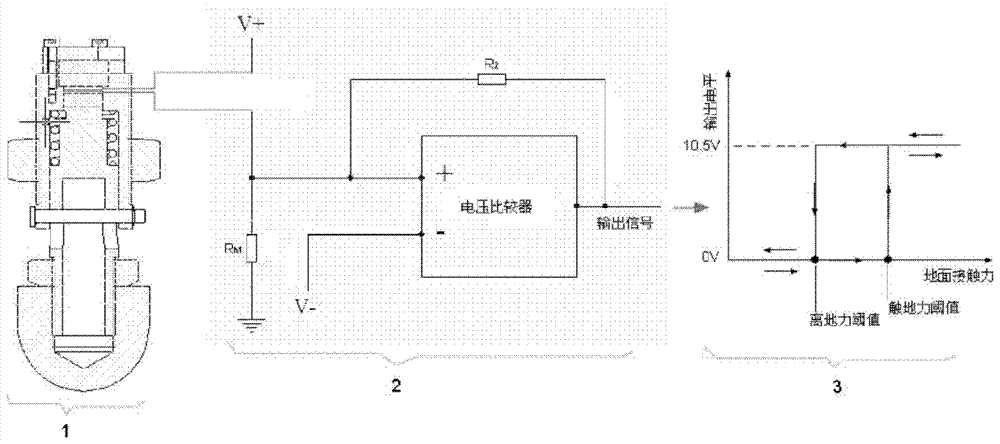
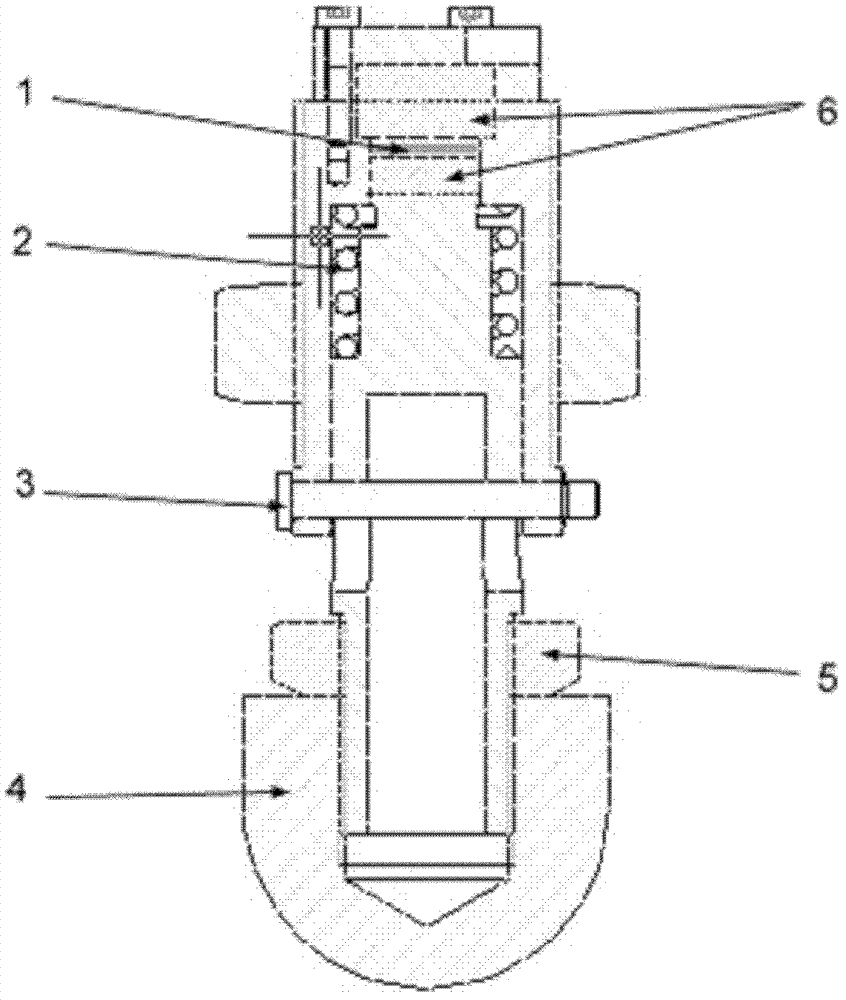
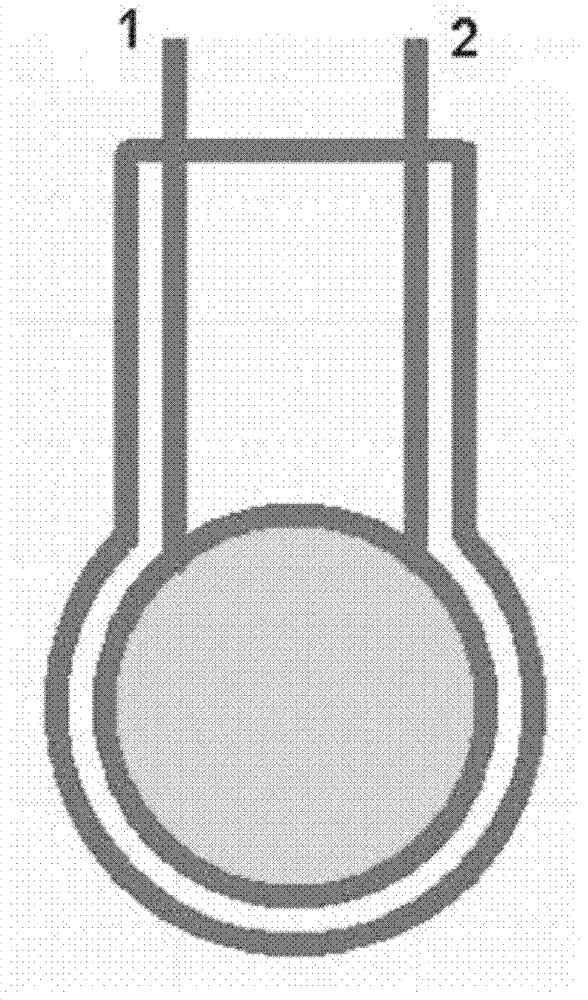
[0020] figure 1 It is the general structure diagram of the multi-legged robot ground contact force detection system. Among them, 1 is the passive compliance device of the foot of the multi-legged robot, 2 is the detection circuit, and 3 is the dual threshold output of the detection circuit. The passive compliance device of the multi-legged robot foot is as follows: figure 2 As shown, it mainly includes a force sensitive resistor, a return spring and a rubber cylindrical gasket; the detection circuit is as follows Figure 4 As shown, it includes a voltage comparator, voltage divider resistor R M and resistor R 2 ; The force sensitive resistor in the passive compliance device of the multi-legged robot is connected betw...
PUM
| Property | Measurement | Unit |
|---|---|---|
| electrical resistance | aaaaa | aaaaa |
| electrical resistance | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More