

Method for adaptively tracking and controlling fingertip force of robot anthropomorphic finger
A tracking control, robot technology, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of poor control accuracy and poor control effect, and achieve the effect of fast contact force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings.
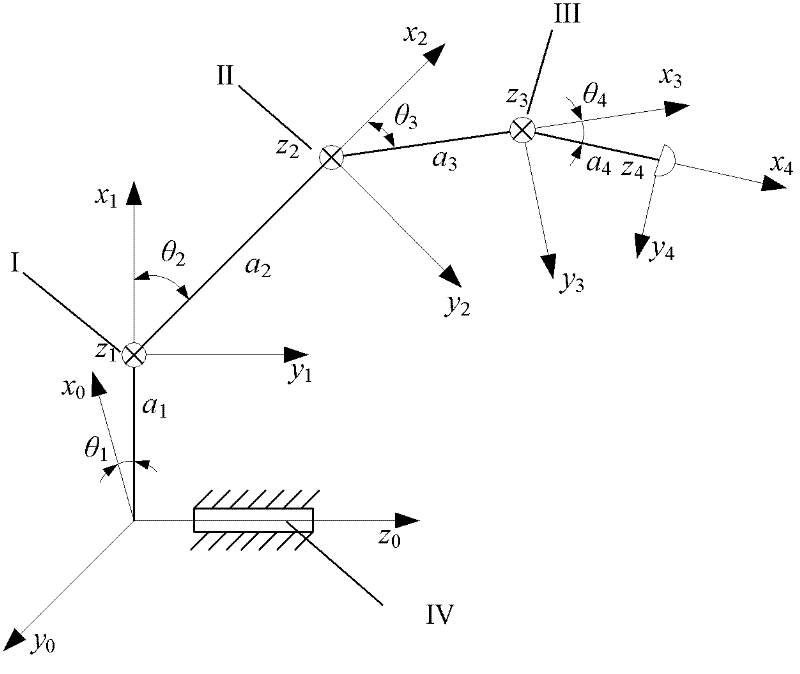
[0043] refer to Figure 1 to Figure 4 , a robot anthropomorphic finger adaptive fingertip force tracking control method, comprising the following steps:
[0044] 1) It is set that the anthropomorphic finger of the robot has n joints and n degrees of freedom, n is a natural number, and n≥2, the finger includes 1 side swing joint and n-1 bending joints, and the D-H of the finger with n degrees of freedom is established The linkage coordinate system, where the coordinate system x 0 the y 0 z 0 is the base coordinate system, that is, the fixed coordinate system; x 1 the y 1 z 1 , x 2 the y 2 z 2 ,...x n the y n z n Established relative to the base coordinate system, all are moving coordinate systems, x n the y n z n is the fingertip coordinate system;
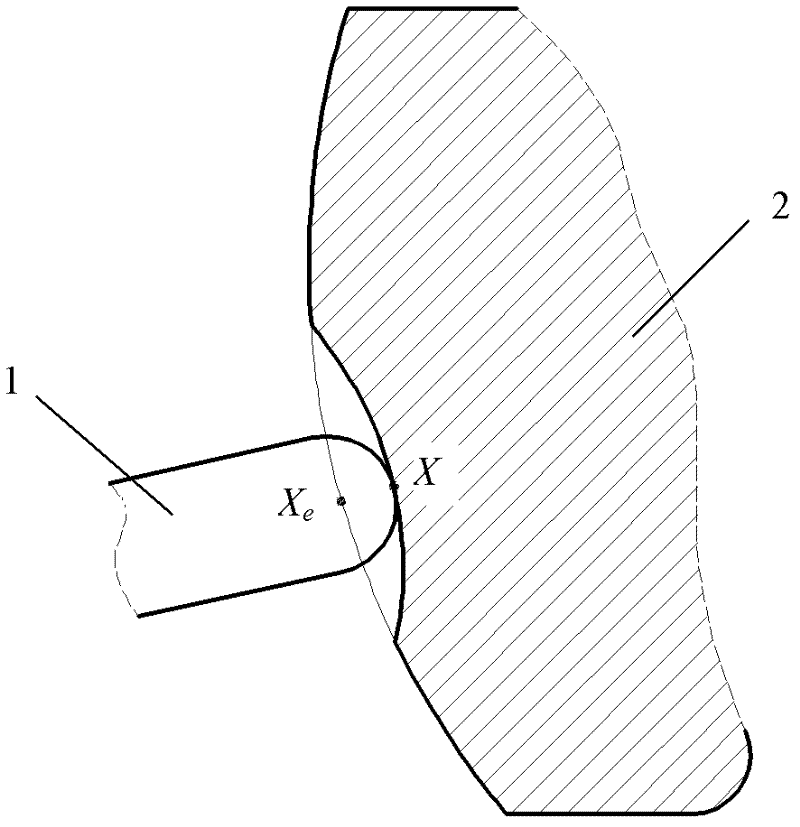
[0045] 2) A fingertip five-dimensional force sensor is installed on the fingertip, and the actual contact...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More