

Tree climbing type carya cathayensis picking robot
A technology for picking robots and pecans, applied in the field of robots, can solve the problems of high cost, poor operability, poor safety, etc., and achieve the effects of low cost, convenient operation and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
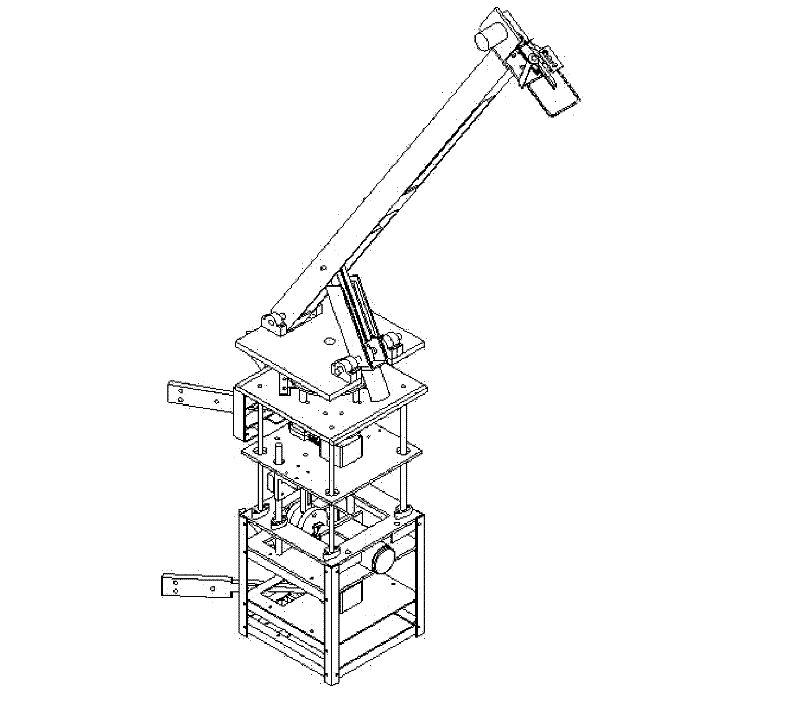
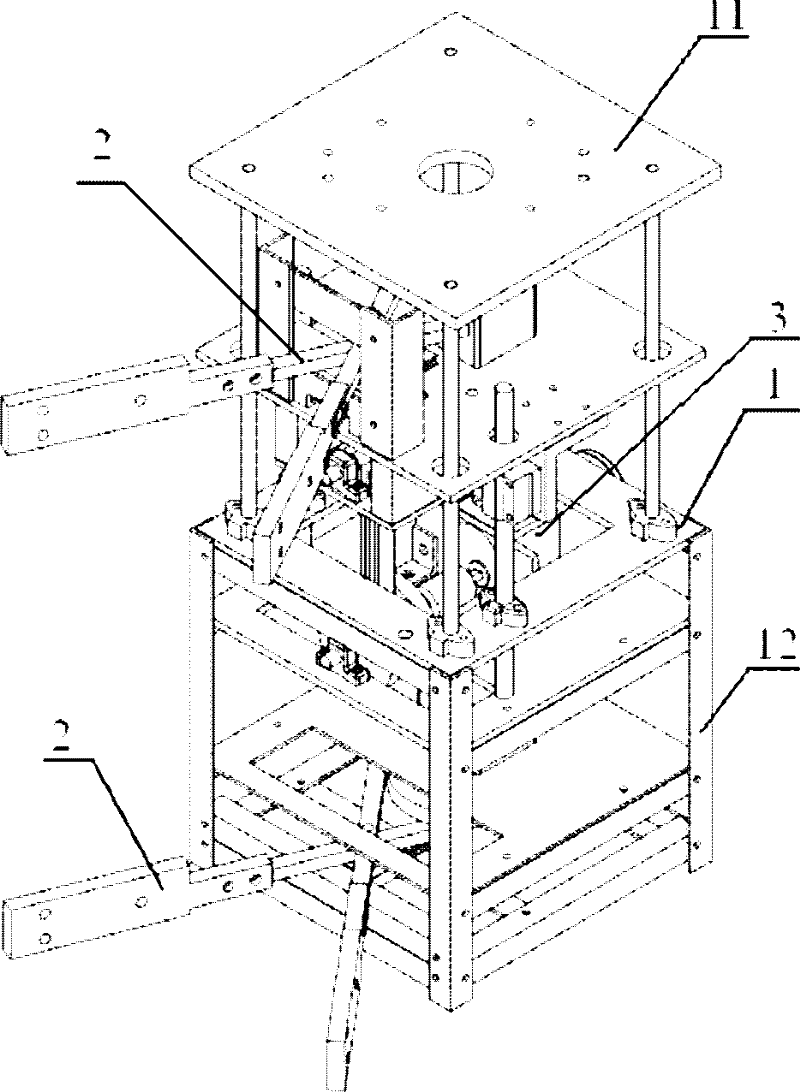
[0036] refer to Figure 1 to Figure 11 , a tree climbing type hickory picking robot, the hickory picking robot includes a tree climbing mechanism, a mechanical arm and an end effector, the mechanical arm is installed on the tree climbing mechanism, the upper end of the mechanical arm is installed the end effector,
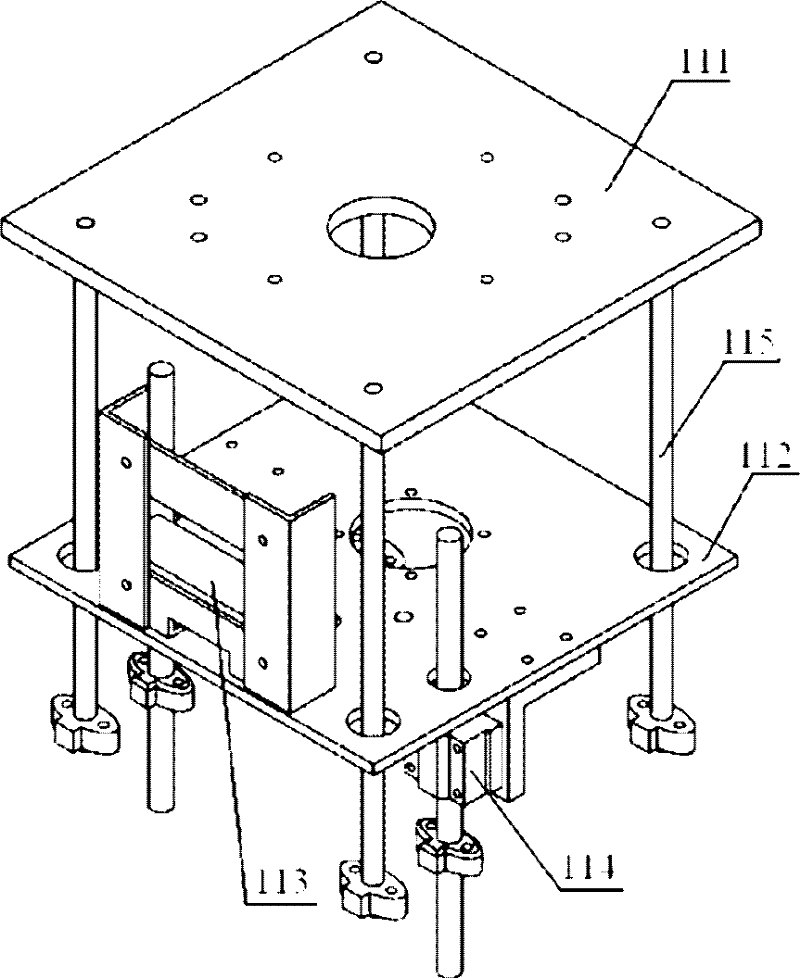
[0037] The mechanical arm of the present invention includes a rotary mechanism, a swing drive mechanism, and a telescopic mechanism. The structure of the rotary mechanism is: the bearing plate 42 is fixed on the top of the supporting plate 40 through four support columns 53, and the rotary motor 52 is fixed on the rotary motor frame 41. Above, the rotary motor frame 41 is fixed on the pallet 40 . The connecting shaft 50 is connected with the rotary drive motor 52, and passes through the bearing plate 42 and the horizontal bearing 51 fixed on the bearing p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More