

Method for controlling stability of vehicle based on vertical load distribution of tire
A technology of stability control and vertical load, applied in the field of vehicle safety control, can solve the problem of not considering the nonlinear coupling relationship of lateral force and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
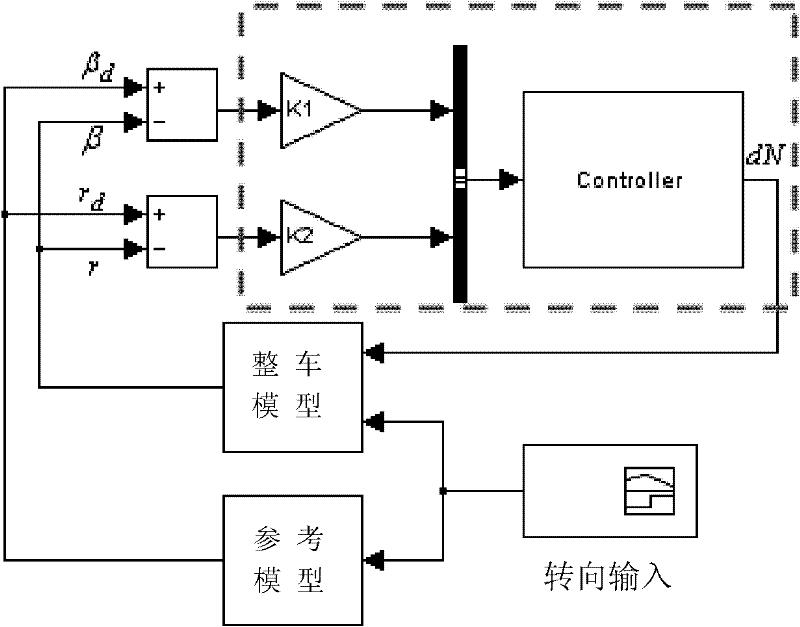
[0037] see figure 1 , the present invention discloses a vehicle stability control method based on tire vertical load distribution, the control method comprising the following steps:
[0038] Step S10, the driver gives a steering input, and the vehicle model and the vehicle reference model estimate the vehicle motion state information and ideal state information; and determine whether the vehicle is in a stable state by comparing the vehicle information;
[0039] Step S20, the tracking error of the vehicle is input to the PID controller, and the active force feedback of the suspension is obtained through the corresponding PID control algorithm;
[0040] Step S30 , after the vehicle accepts the feedback control, the vertical load of the tires of the vehicle is redistributed to generate a corrected yaw moment to suppress the sideslip of the vehicle, and the stability of the vehicle is improved.
[0041] As a preferred solution of the present invention, in the step S10, the monit...
Embodiment 2
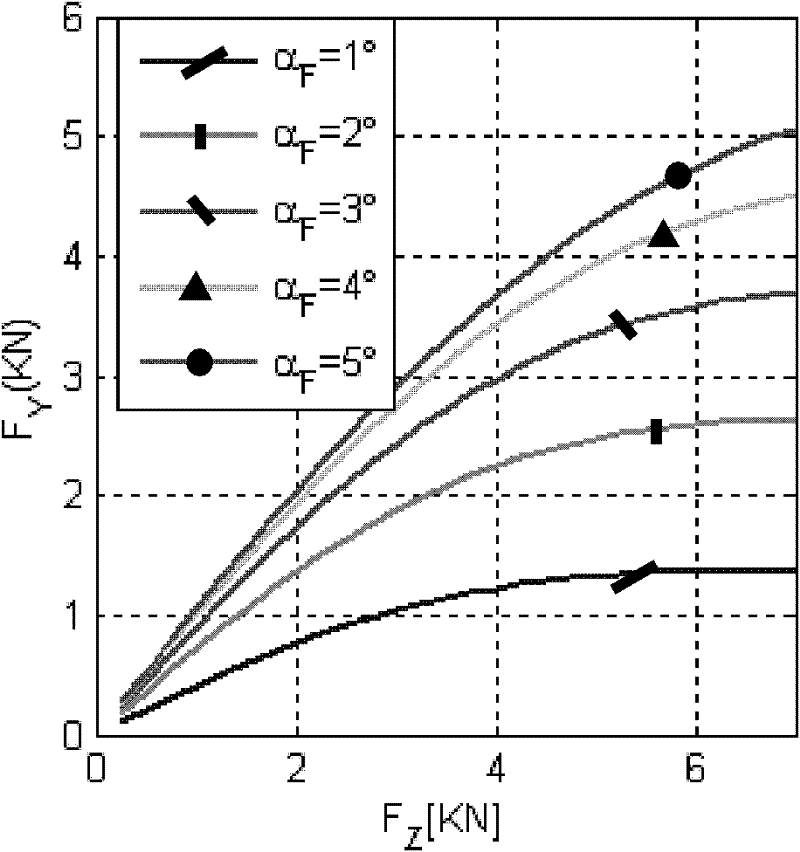
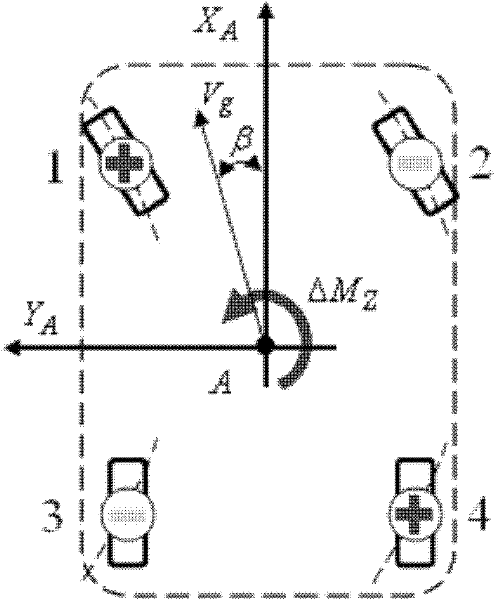
[0057] The working mechanism of the present invention is the nonlinear coupling relation of tire vertical force and lateral force. In order to clearly describe this control strategy, the present invention adopts the magic tire model under the pure cornering condition, and the coupling relationship between the vertical load and the cornering force is as follows figure 1 . The figure shows that as the vertical tire load F Z With the increase of , the slope of the cornering force FY provided by the tire gradually decreases. Using the vertical and lateral coupling mechanism of the tire, the vertical load distribution of the tire can be optimized through the active suspension control force, so the front and rear vertical load transfer will cause a cornering force difference between the front and rear tires, and then form a vehicle The yaw moment required for stable driving. Such as figure 2 Shown (V g is the speed of the vehicle, β is the side slip angle of the body center of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More