

Visual locating system of spherical robot and visual locating method thereof
A spherical robot and visual positioning technology, which is applied in the direction of instruments, photogrammetry/video metrology, measuring devices, etc., can solve the problems of difficult camera installation, inaccurate positioning, and large amount of calculation, so as to ensure positioning accuracy and real-time performance , Reduce positioning error and improve positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with accompanying drawing
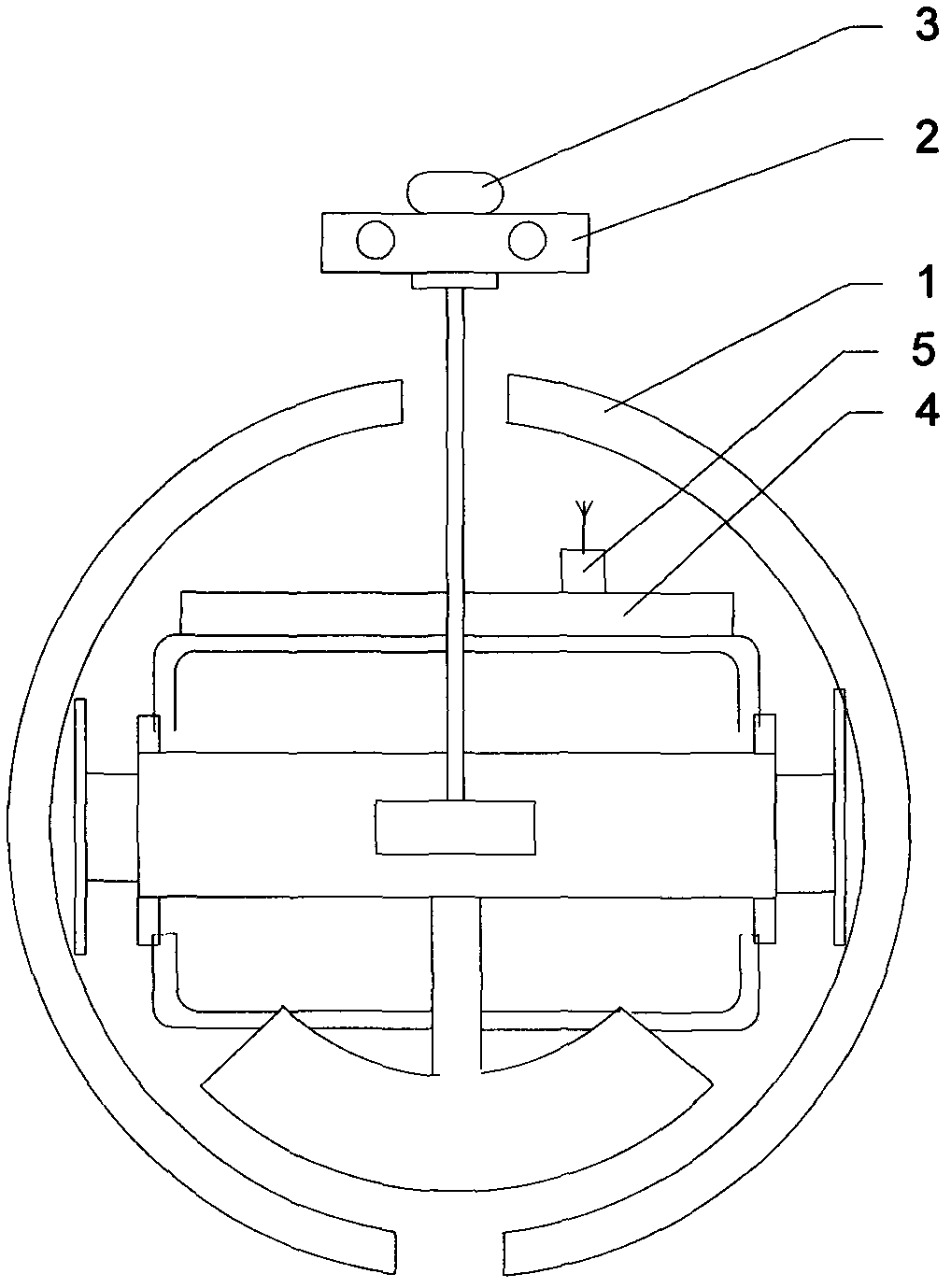
[0039] Such as figure 1 Shown is the spherical robot vision navigation system of the present invention. The system includes: a spherical robot body 1 , a binocular vision system 2 , a gyroscope 3 , a core control system 4 , and a wireless communication module 5 . The positioning system coordinates the binocular positioning system 2 and the gyroscope 3 to perform positioning. The positioning algorithm is implemented online in the core control system 4. The positioning data is transmitted remotely through the wireless communication module 5. Users can remotely monitor the position of the spherical robot body 1 in real time. .
[0040] The spherical robot body 1 consists of two hemispherical shells on the left and right to form a spherical shell with a slit in the middle; the main frame is installed in the spherical shell, which is fixedly connected with the heavy pendulum. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More