

Three-degree-of-freedom microoperation orthogonal parallel operating platform used for ultraprecise location
A degree of freedom, micro-manipulation technology, applied in the parts and instruments of the instrument, can solve the problems of the actual accuracy of components being difficult to meet, component manufacturing and assembly errors, etc., and achieve low processing and manufacturing costs, high positioning accuracy, and structural stress. good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
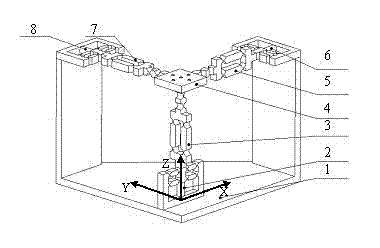
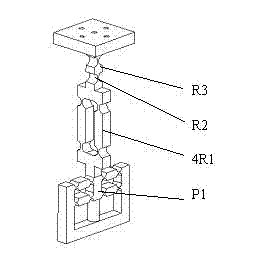
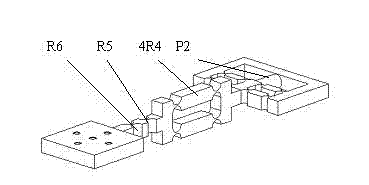
[0018] Such as figure 1 As shown, the present invention is made up of three major parts, and the one, the moving platform 4 that connects terminal operating part, and it can realize three-dimensional translation of space; The input required by the whole device is provided; the third is three flexible first, second and third branch chains 3, 5 and 7 connecting the dynamic platform 4 and the static platform 1, and the top of each branch chain is connected with the static platform 1 on At the drive points of the three piezoelectric ceramics 2, 6, and 8, the end of each branch chain is vertically connected to the moving platform, which is connected to the moving platform 4 in an orthogonal form.
[0019] The static platform 1 is composed of three panels, the three panels are a horizontal bottom panel and two vertical panels, and the two vertical panels are orthogonal to each other and are vertically orthogonal to the horizontal bottom panel. In the space surrounded by the three ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More