

Novel parallel manipulator with five freedom degrees
A degree of freedom, manipulator technology, applied in the field of robotics, can solve the problems of unfavorable mechanism high stiffness/mass ratio, affecting the fast-forward capability and dynamic performance of the mechanism, and large weight of the end effector, and achieves the realization of modular structure design and positioning accuracy. With high repeat positioning accuracy and good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Below in conjunction with specific embodiment, and with reference to accompanying drawing, the present invention will be further described:
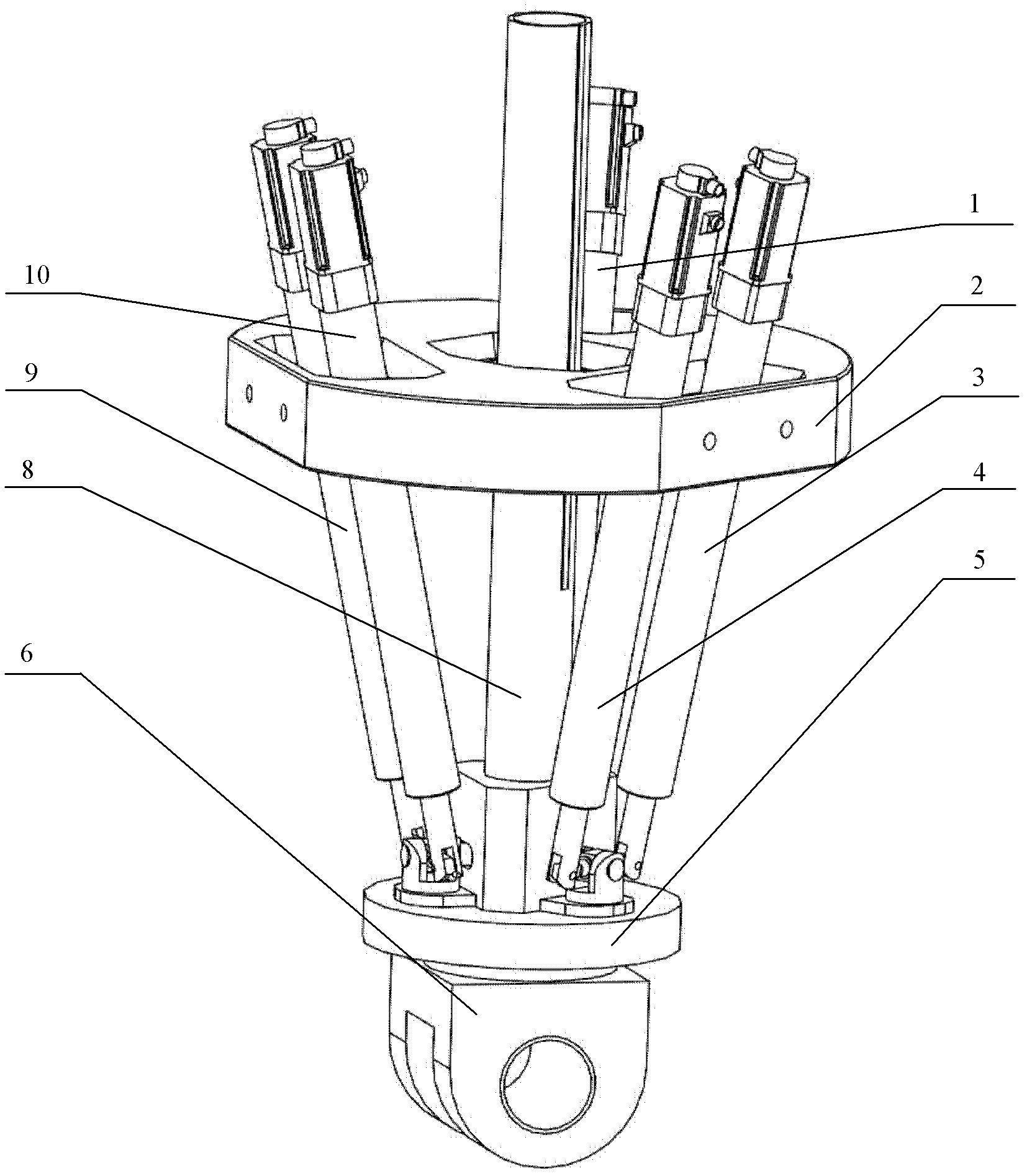
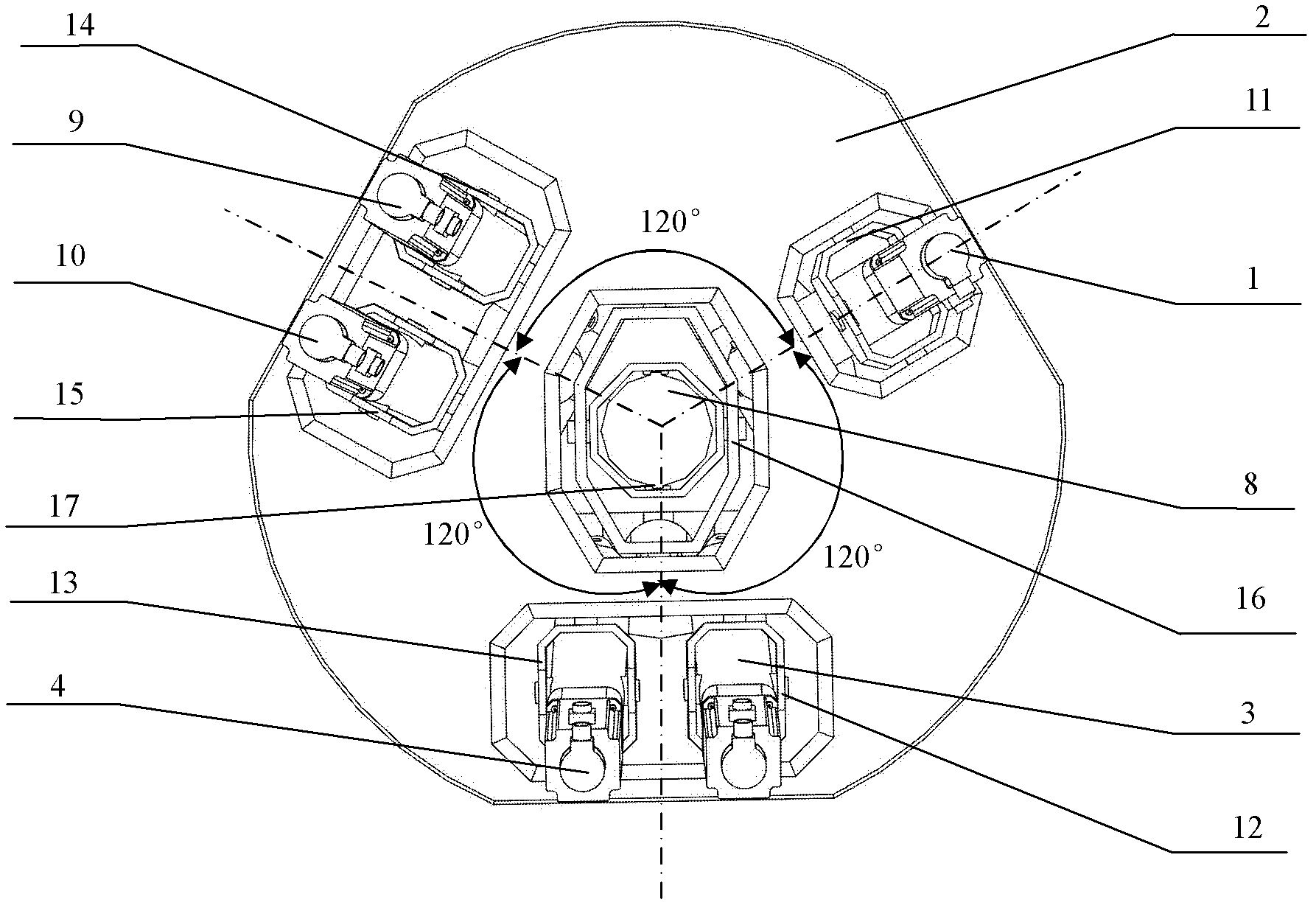
[0014] As shown in the accompanying drawings, the novel five-degree-of-freedom parallel manipulator of the present invention includes a fixed mount 2, a first main kinematic chain, a second main kinematic chain, a third main kinematic chain, and a driven branch chain 8. The first described A main kinematic chain includes a first active branch chain 1, the second main kinematic chain includes second and third active branch chains 3, 4, and the third main kinematic chain includes fourth and fifth active branch chains 9, 10, the driven branch chain is located in the driven branch chain seat set in the central opening of the fixed frame, the first, second and third main kinematic chains are placed symmetrically with respect to the driven branch chain and mutually The phase between them is 120°, the first active branch chain is located...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More