

Universal gravitation search-based unmanned plane air route planning method
A route planning and universal gravitational technology, applied in the field of robotics, can solve problems such as long search time, easy to fall into local optimal solution, and stagnation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The performance of the UAV route planning method based on gravitational search proposed by the present invention will be verified by a specific example below. The experimental environment is 2.2Ghz, 1G memory, MATLAB version 7.60.
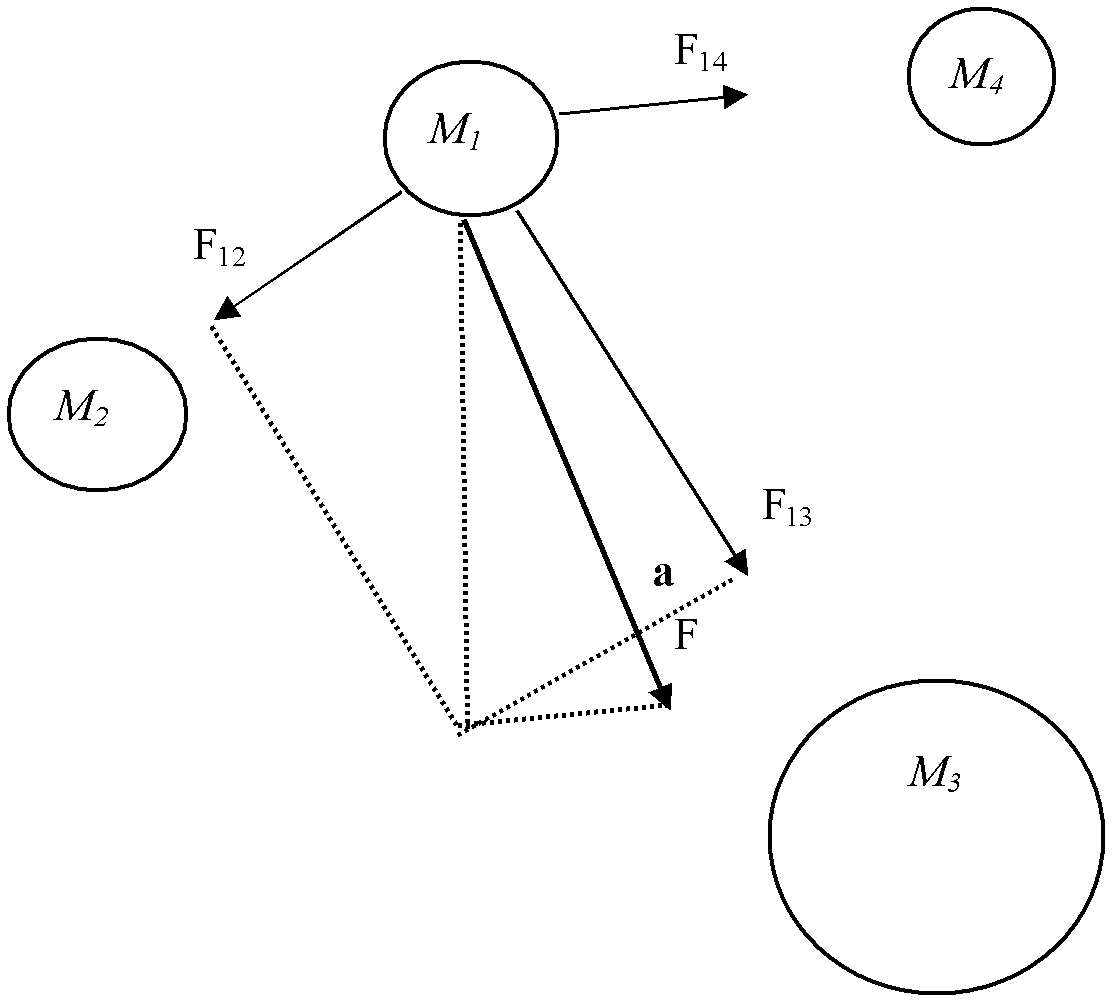
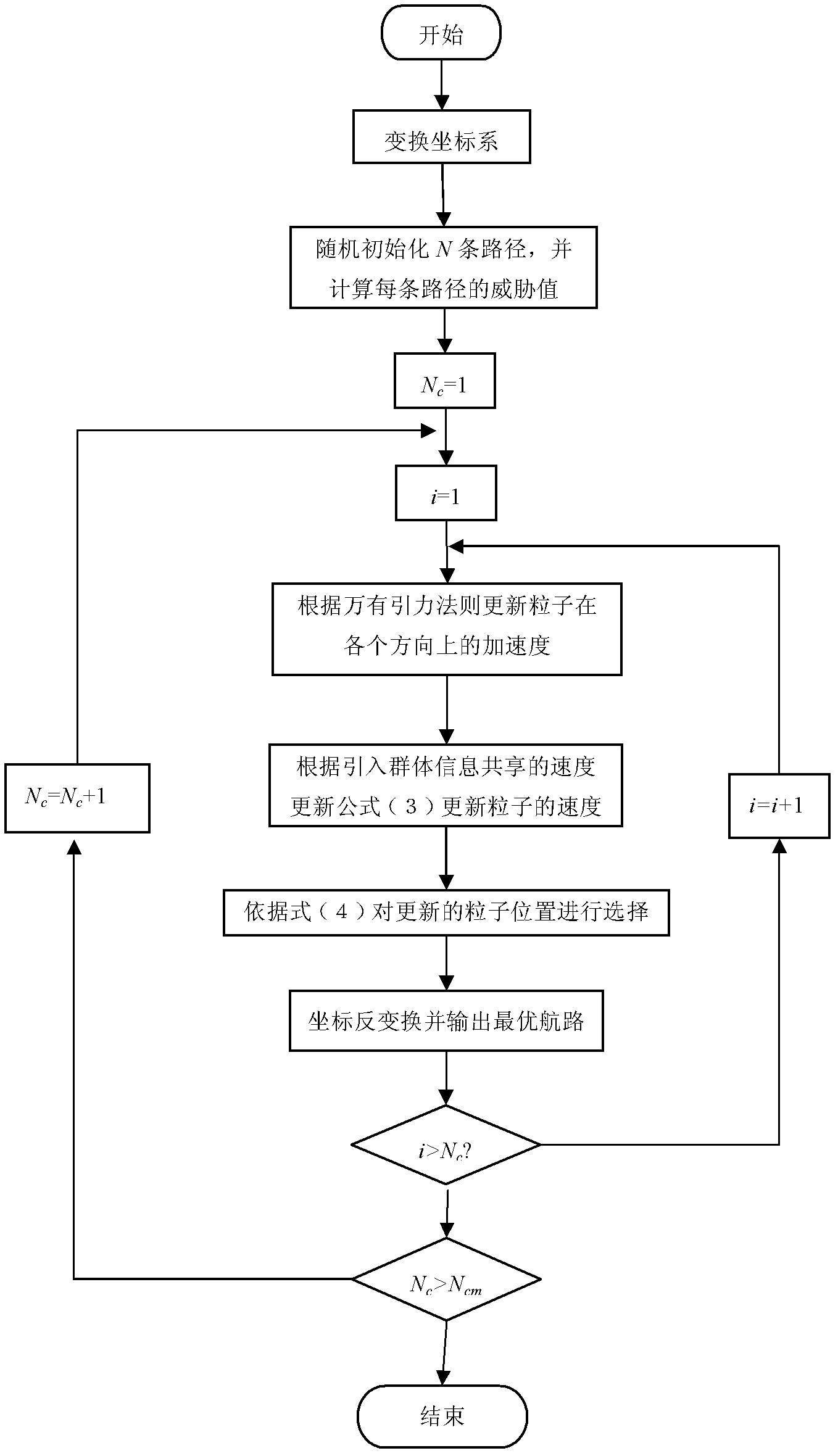
[0084] See image 3 , a UAV route planning method based on gravitational search, its specific implementation steps are as follows:
[0085] Step 1: Establishment of the mathematical model of UAV route planning:
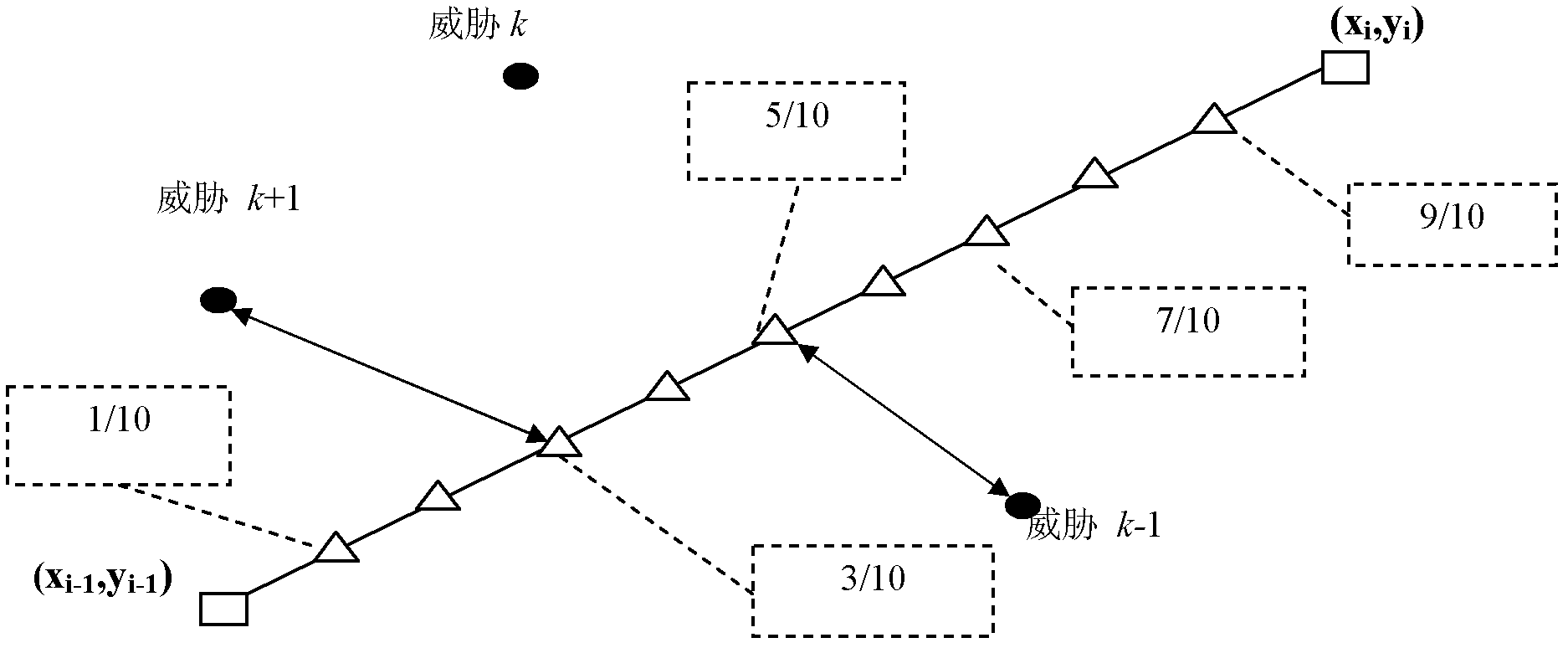
[0086] (1) The establishment of the mathematical model of the UAV battlefield; using a deterministic state space search method to reduce the scale of the planning space, the UAV route planning problem is simplified into a two-dimensional route planning problem, that is, a D-dimensional function Optimization;
[0087] min J = ∫ 0 L [ kw t + ( 1 - ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More