

Small full-automatic planer three-degree-of freedom mechanical arm
A robotic arm, fully automatic technology, applied in the field of robots, can solve the problems of low motion and positioning accuracy, high labor cost, and achieve the effect of simple structure, compact components and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
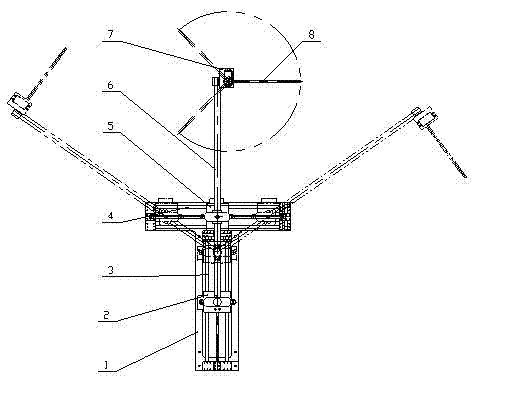
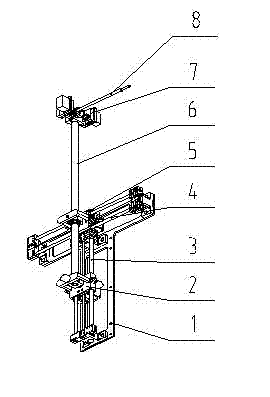
[0047] figure 1 It is a structural schematic diagram of an embodiment of the present invention; figure 2 It is a schematic diagram of a three-dimensional structure of an embodiment of the present invention.
[0048] like figure 1 and figure 2 Shown: a small fully automatic plane 3 degrees of freedom mechanical arm, including: a base 1; an operating arm 8; an end drive unit 7 connected to the operating arm 8 for driving the swing of the operating arm 8; and the end drive unit 7 connected to the sliding rod 6; set on the upper part of the base 1, connected with the sliding rod 6, and used to drive the linear motion mechanism of the sliding rod 6 translation and swing.
[0049]The linear motion mechanism includes a first guide unit 3, a first slider 2, a second guide unit 4 and a second slider 5, and the first guide unit 3 and the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More