

End effector of intelligent harvesting robot
An end effector and robot technology, which is applied in the field of harvesting robots, can solve the problems of poor versatility, poor operation effect, and low degree of intelligence, so as to improve the grasping stability, improve the separation method of fruit stems, and improve the general sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
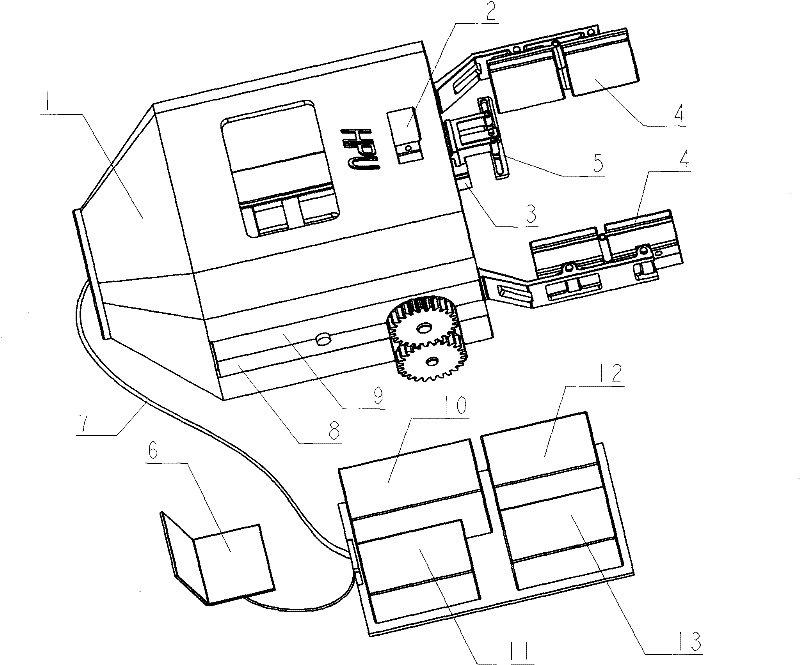
[0010] Intelligent harvesting robot end effector (such as figure 1 ) consists of mechanical system, control system, perception system and power supply system. Wherein the mechanical system is composed of a finger grasping mechanism (4), a stem separation mechanism (5) and a housing support mechanism, and the housing support mechanism includes a housing (1), an upper support body (9) and a lower support body (8) ; The control system is composed of a motion controller (12), a driver (13) and a micro DC servo motor (4-12, 5-12); the power supply system is composed of a lithium battery pack (10) and a voltage stabilizing and transforming module (11) Composition; Perception system is made up of force-sensitive sensor (4-8, 4-14, 4-21 and 4-24), camera (2) and distance sensor (3).
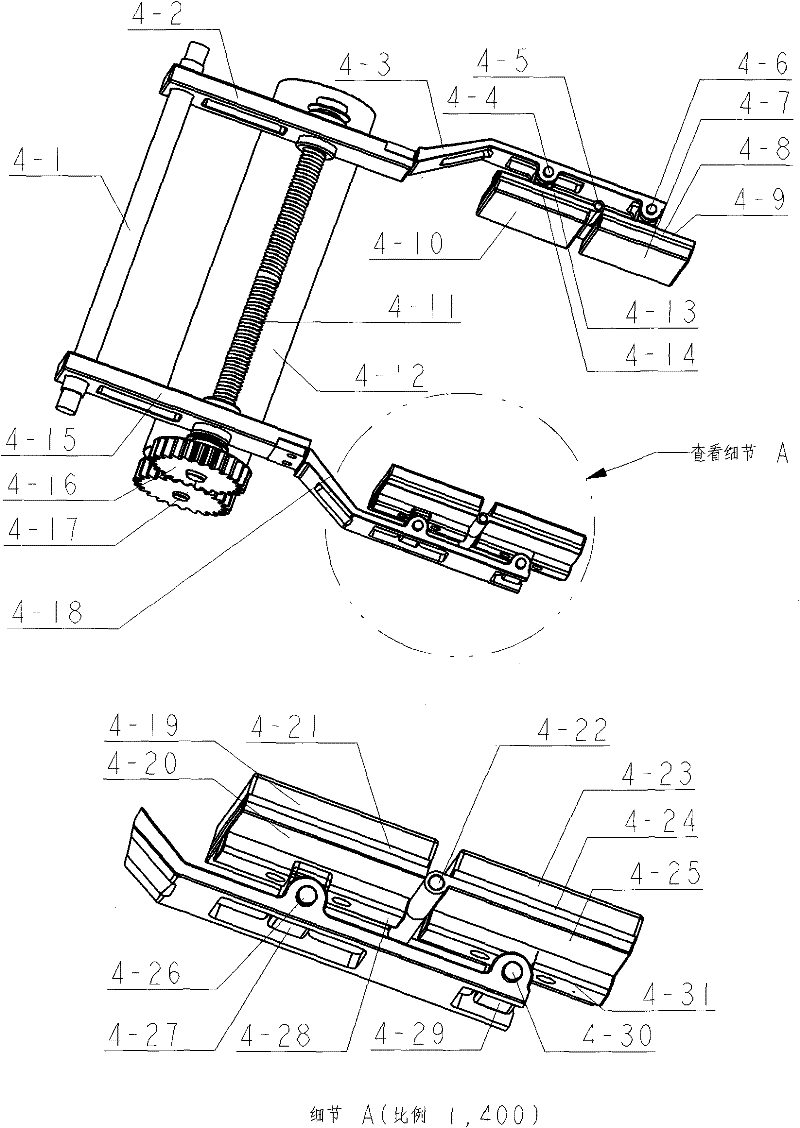
[0011] Finger gripping mechanism (4) such as figure 2 As shown, including support rods (4-1), transmission plates (4-2 and 4-15), connecting plates (4-3 and 4-18), rotating shafts (4-4, 4-5, 4-6 , 4-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More