

Method for controlling direction of rotation axis and rotation direction of space universal superposition rotating magnetic field
A technology of rotating magnetic field and rotating direction, which is applied in the field of automation engineering technology, and can solve problems such as the inability to realize the control of the orientation and direction of the superimposed rotating magnetic field
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0097] Implementation steps of the present invention are as follows:
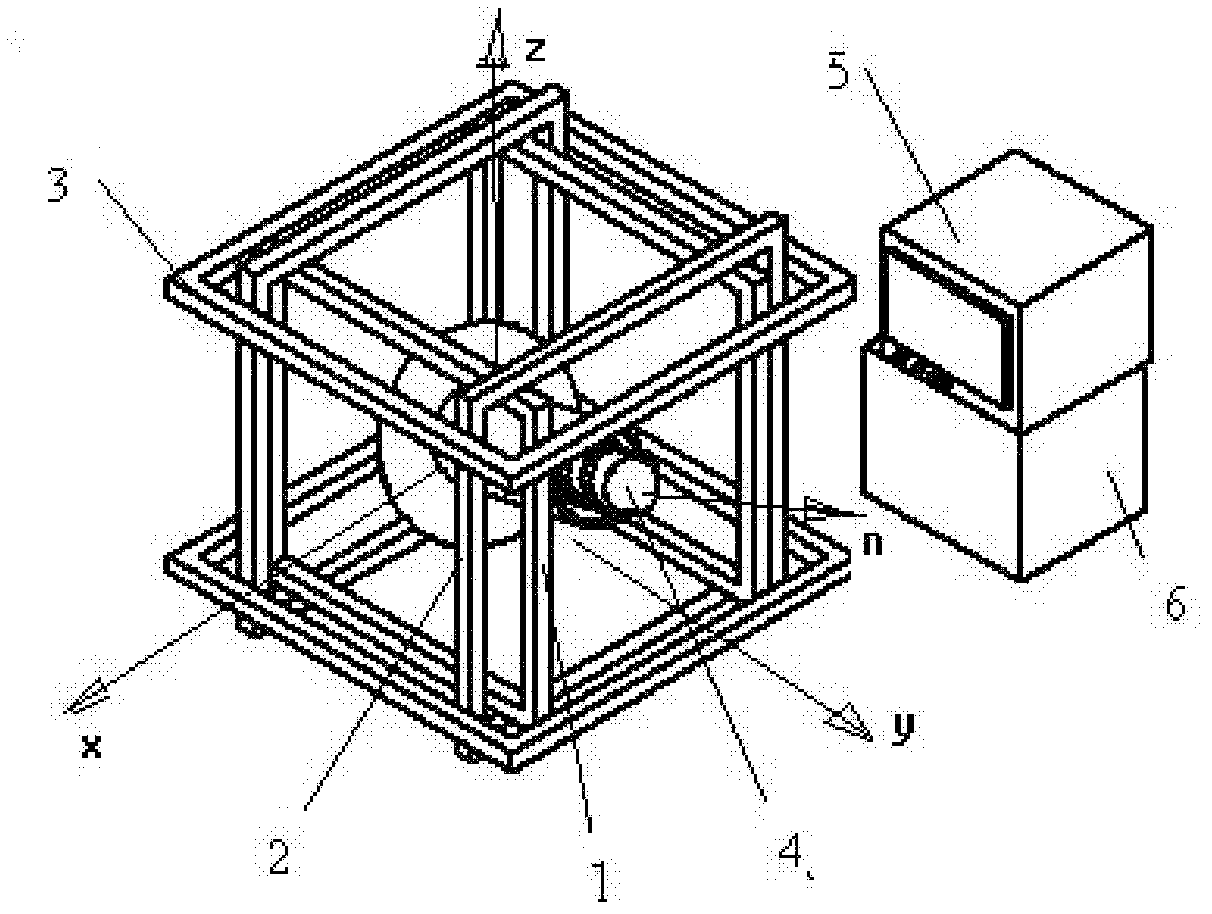
[0098] (1) Plan three-axis orthogonally nested Helmholtz coils to accommodate the micro-robot system: use the Helmholtz coil group 3 whose axis is the z-axis, and the Helmholtz coil group 2 whose axis is the y-axis and The installation plan of the Helmholtz coil group 2 whose axial direction is the x-axis is orthogonally nested in order from large to small. When designing the three groups of coils, the current matching problem must be considered, that is, when the same DC drive current is applied, the The DC magnetic field strength at the center of the three groups of coils should be equal. Since the large air gap of the coil size is also large, in order to increase the magnetic field strength at the center point under the same current, the number of coil turns must be increased to meet the current matching conditions. The numbers of turns of the sequential Helmholtz coil group 3 , Helmholtz coil group 2 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More