

Wheel-track combined self-adaption robot mobile platform based on planet wheels
A mobile platform and planetary wheel technology, applied in motor vehicles, crawler vehicles, transportation and packaging, etc., can solve the problems of inability to overcome obstacles in the forward and reverse directions, raising the center of gravity of the mobile platform, and poor stability during obstacle crossing. The effect of stability, good cornering performance and improved efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
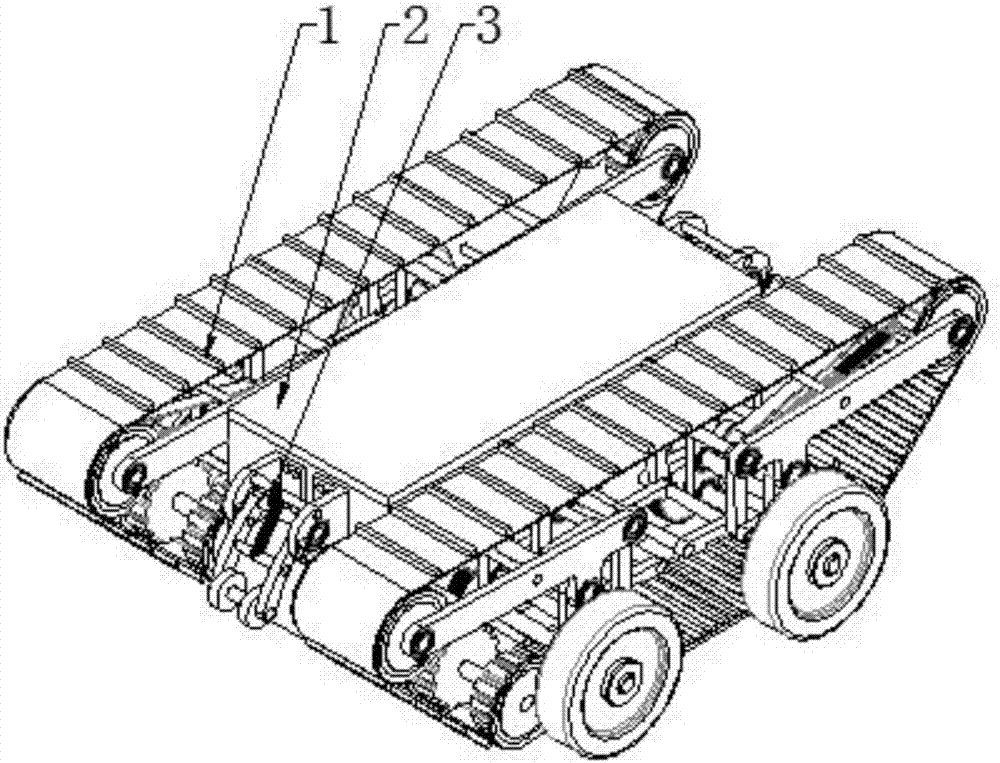
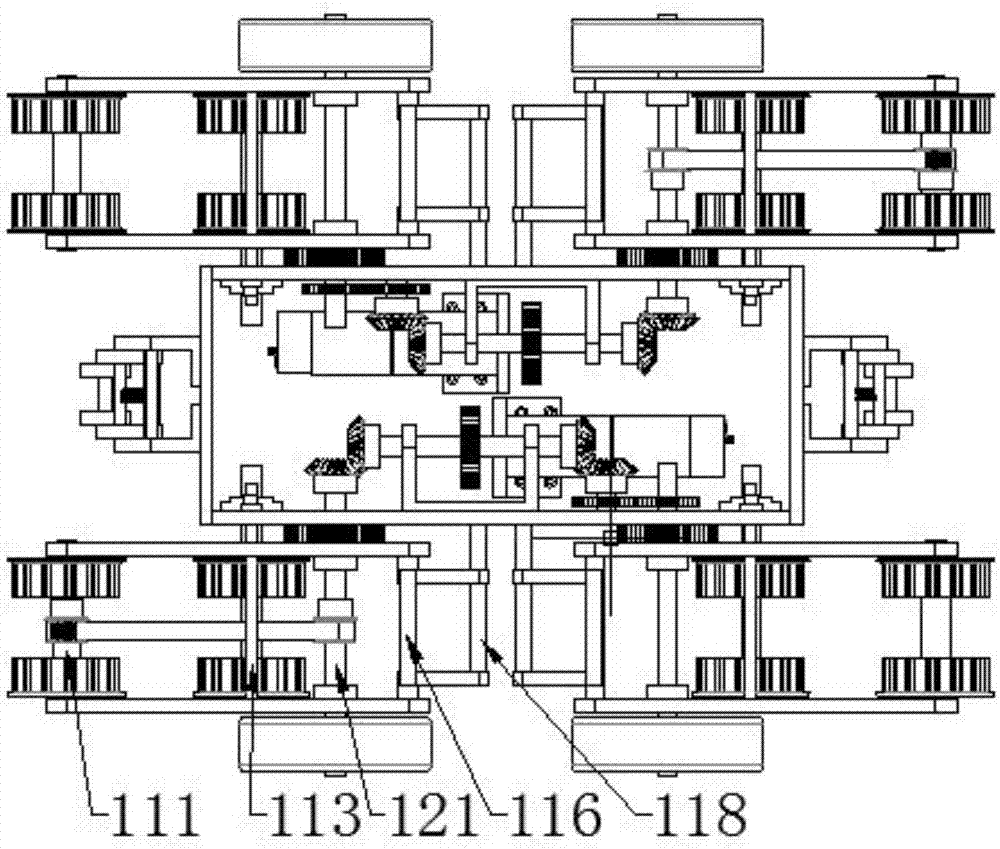
[0034] Example: such as figure 1 , figure 2 As shown, the wheel-shoe composite adaptive robot mobile platform (abbreviation mobile platform) based on planetary wheels of the present invention includes a car body module 2, two wheel-shoe composite modules 1 and two tail wheel modules 3; two wheel-shoe composite modules 3; The composite module 1 is distributed on the left and right sides of the vehicle body module 2 in a form of central symmetry with the centroid axis of the vehicle body module 2. The power drive system for driving the action of the two wheel-shoe composite modules 1 is installed in the vehicle body module 2. The tail wheel modules 3 are symmetrically distributed at the front and rear ends of the vehicle body module 2; the mobile platform is symmetrical around the centroid axis of the vehicle body module as a whole. The external constraint force can be converted into the driving force for the deformation of the mobile platform of the present invention, so that...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More