

Vehicular stability control system based on variable structure theory
A technology of stability control and variable structure control, applied in the field of vehicle stability control system based on variable structure theory, can solve problems such as change sensitivity, application difficulty, uncontrollable system stability and strict convergence proof, etc. Simple, robust, and physically easy to implement effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
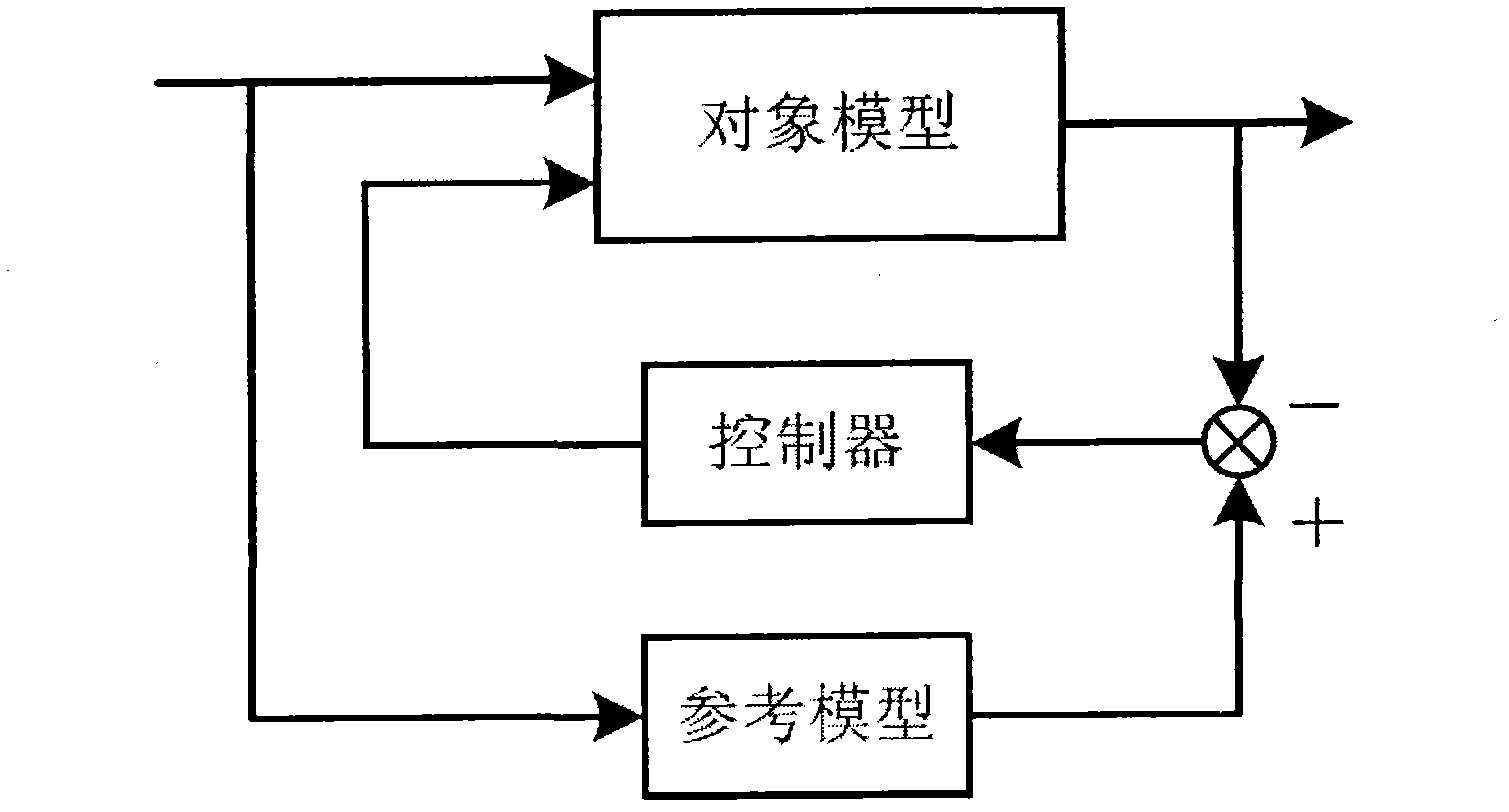
[0027] Such as figure 1 As shown in , the model refers to the structure of the vehicle stability control system. The reference model can be explicit or implicit. In the explicit case, the reference model is a component of the control system, and the characteristics required by the control system It is explicitly specified by the dynamic response of the state of the reference model; implicitly, the reference model is only used for the calculation of the control law and does not appear obviously in the control system.
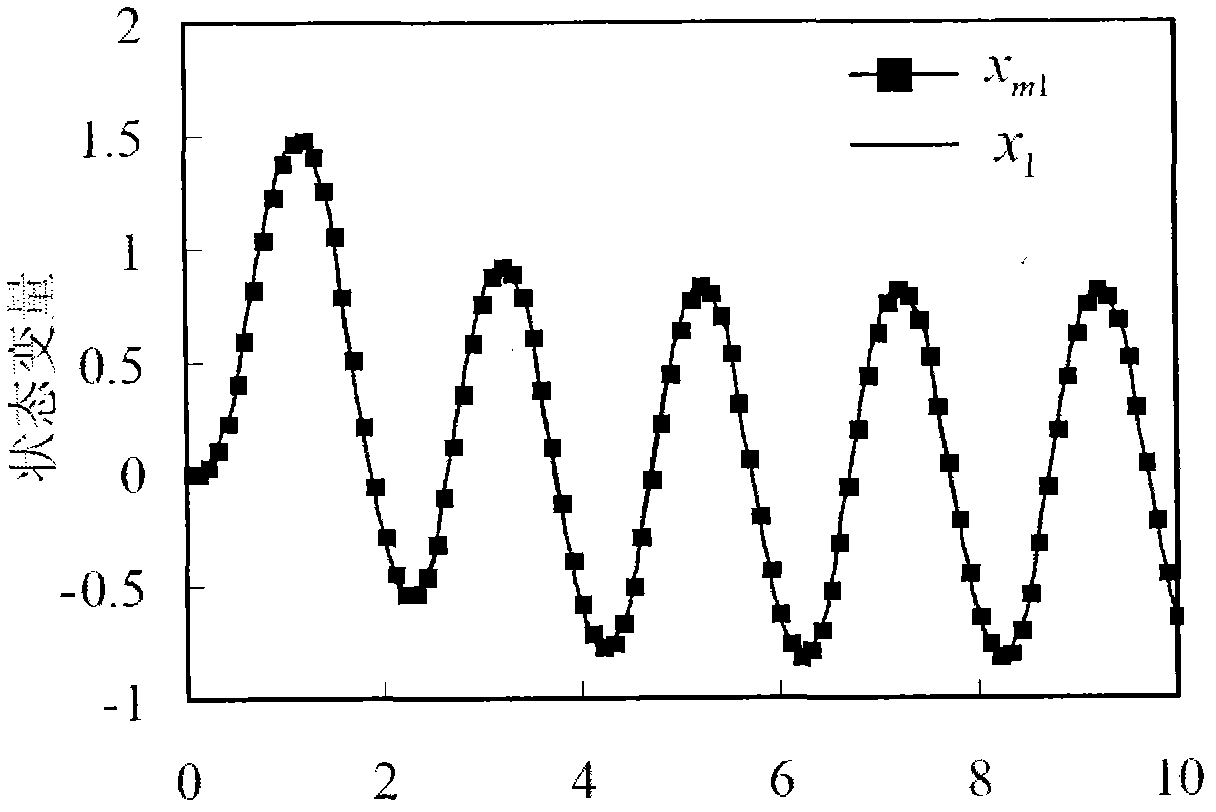
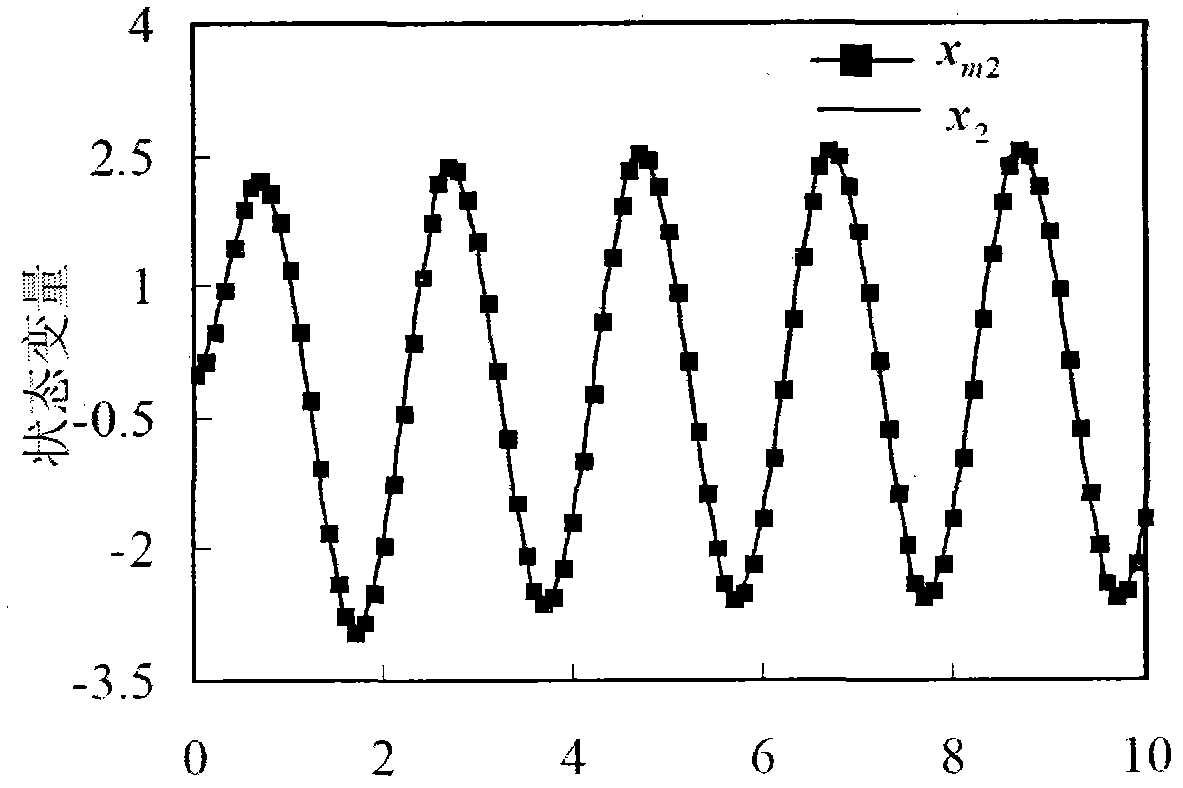
[0028] Figure 2 to Figure 5 is the specific simulation result of the model reference vehicle stability control system, it can be clearly seen that the system state variable x 1 、x 2 Under the condition of parameter perturbation and external disturbance at the same time, it is still very ideal to realize the reference model state variable x m1 、x m2 The tracking shows that the control system has strong robustness, and the algorithm is simple and intuitive, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More