Instantaneous harmonic estimation and compensation type single-phase inverter power supply and control method of single-phase inverter power supply
A technology of single-phase inverter and full-bridge inverter circuit, which is applied in the direction of electrical components, AC power input conversion to DC power output, output power conversion devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0112] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings.
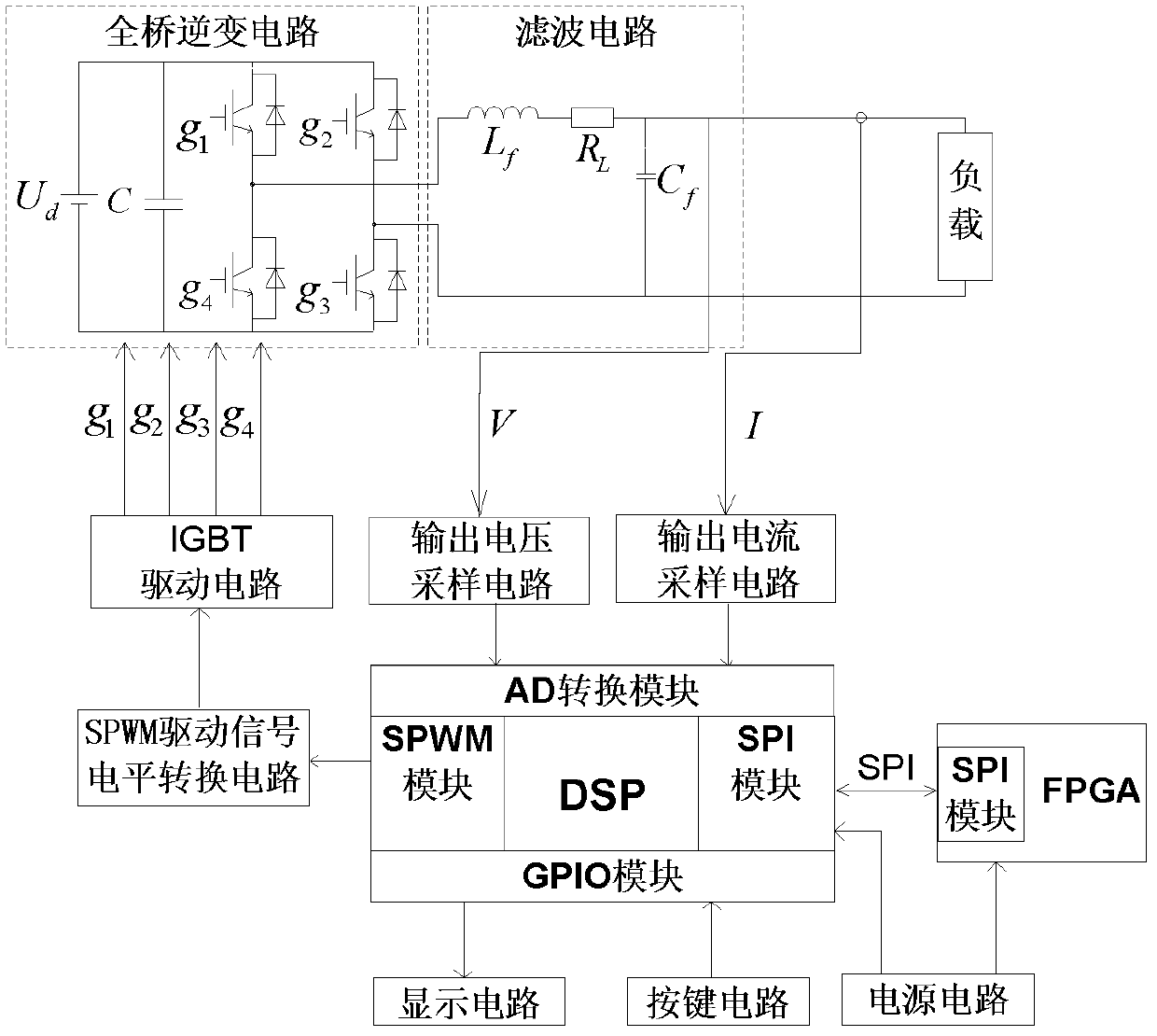
[0113] The instantaneous harmonic estimation and compensation type single-phase inverter power supply provided in this embodiment has a power of 3KW, an output voltage effective value of 220V, and a frequency of 50Hz. The instantaneous harmonic estimation and compensation type single-phase inverter power supply of the present invention, such as figure 1 As shown, it includes full-bridge inverter circuit, filter circuit, output voltage sampling circuit, output current sampling circuit, SPWM drive signal level conversion circuit, IGBT drive circuit, display circuit, button circuit, DSP, FPGA and power supply circuit.
[0114] The full-bridge inverter circuit includes a DC side filter capacitor and four fully-controlled switching devices IGBT, such as figure 1 shown, four IGBTg 1 , g 2 , g 3 , g 4 in, g 1 and g 4 form a bridge arm, g ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



