

Double-closed loop speed control captive trajectory simulation (CTS) test method based on time and space transformation
A speed control, time-space transformation technology, applied in aerodynamic tests, machine/structural component testing, measuring devices, etc., can solve the problems of low test efficiency, low control test accuracy, high energy consumption, and achieve experimental accuracy Low, low test efficiency, high energy consumption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
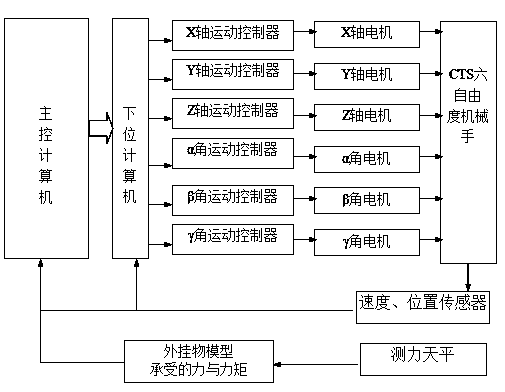
[0022] Such as figure 1 As shown, the double-closed-loop speed control CTS based on space-time transformation is mainly composed of the main control computer, the lower computer and its six-degree-of-freedom motion controller (X-axis, Y-axis, Z-axis, horn, horn, angular motion controller) and motors (X-axis, Y-axis, Z-axis, horn, horn, Angle motor), the motor jointly drives the CTS six-degree-of-freedom model support mechanism (six-degree-of-freedom manipulator), and the position and speed sensor used to detect the position and running speed of the external store model, and is used to measure the force of the load on the external store model Balance; the speed sensor transmits the data to the lower computer to ensure the accuracy of the running speed of the store model, and the position sensor transmits the data to the lower computer to ensure that the position of the store model is within the movement range of the CTS six-degree-of-freedom mechanism; at the same tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More