

Three- DOF (degree of freedom) parallel mechanism with two vertical intersecting rotating shafts
A technology of vertical intersection and degrees of freedom, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of complex structural design, complex mechanism, difficult calibration and control, etc., to improve the rigidity of the mechanism and the bearing capacity, kinematic model Simple, easy-to-control calibration effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
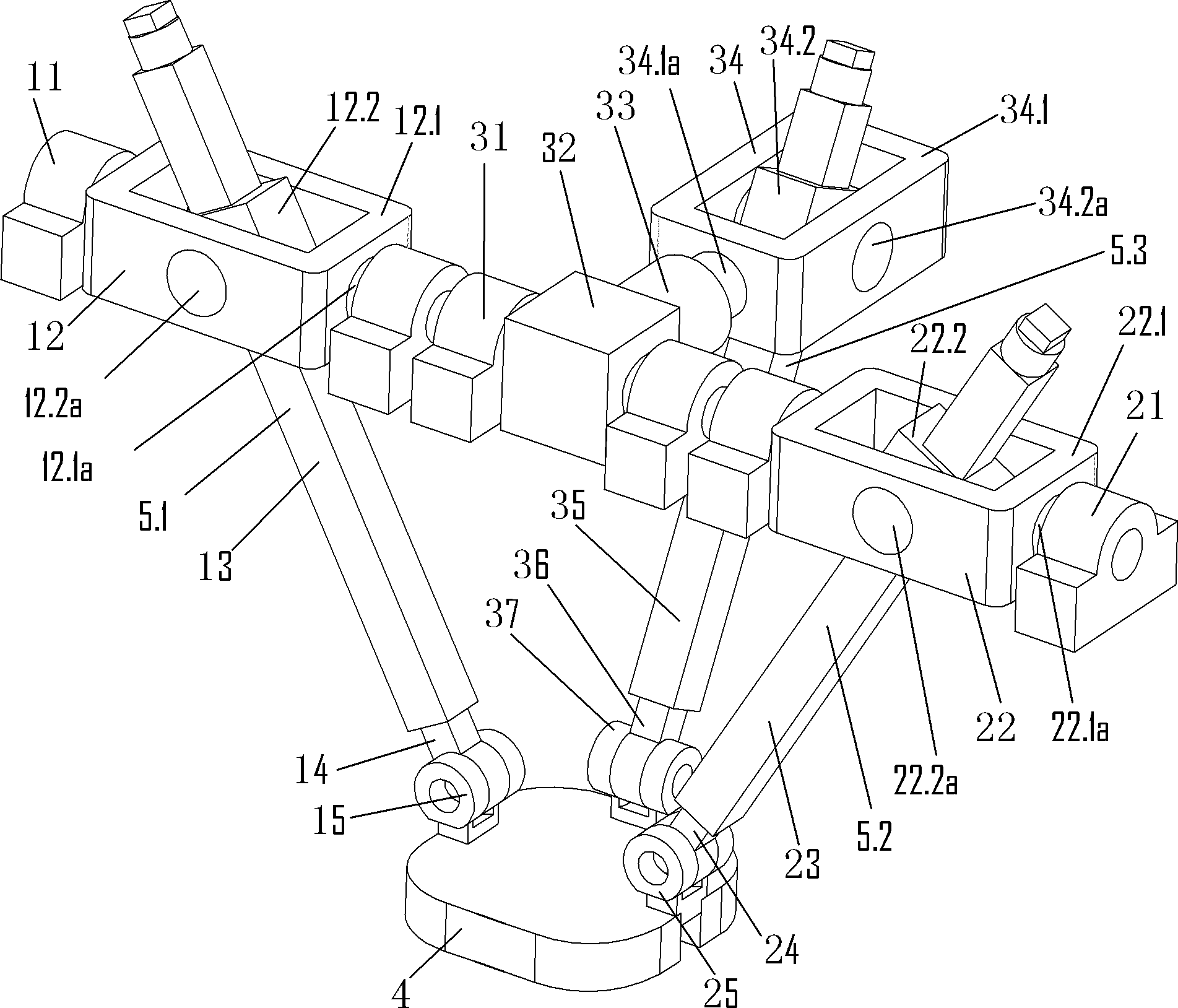
[0038] figure 1As shown, the moving platform 4 is connected in parallel with the frame 11, the frame 21, and the frame 31 through three branches; wherein, in the first branch 5.1, the frame sequentially passes through the universal hinge 12 (the universal hinge includes The outer rotating element 12.1 rotating around the outer rotating shaft 12.1a on the frame and the inner rotating element 12.2 installed on the outer rotating element rotating around the inner rotating shaft 12.2a), the moving pair 13, the connecting rod 14, the rotating pair 15 and the moving The platform 4 is connected; in the second branch 5.2, the frame passes through the universal hinge 22 in turn (the universal hinge includes an external rotating element 22.1 mounted on the frame and rotating around an external rotating shaft 22.1a and a The internal rotating element 22.2 rotating around the internal rotating shaft 22.2a), the moving pair 23, the connecting rod 24, and the rotating pair 25 are connected ...
Embodiment 2
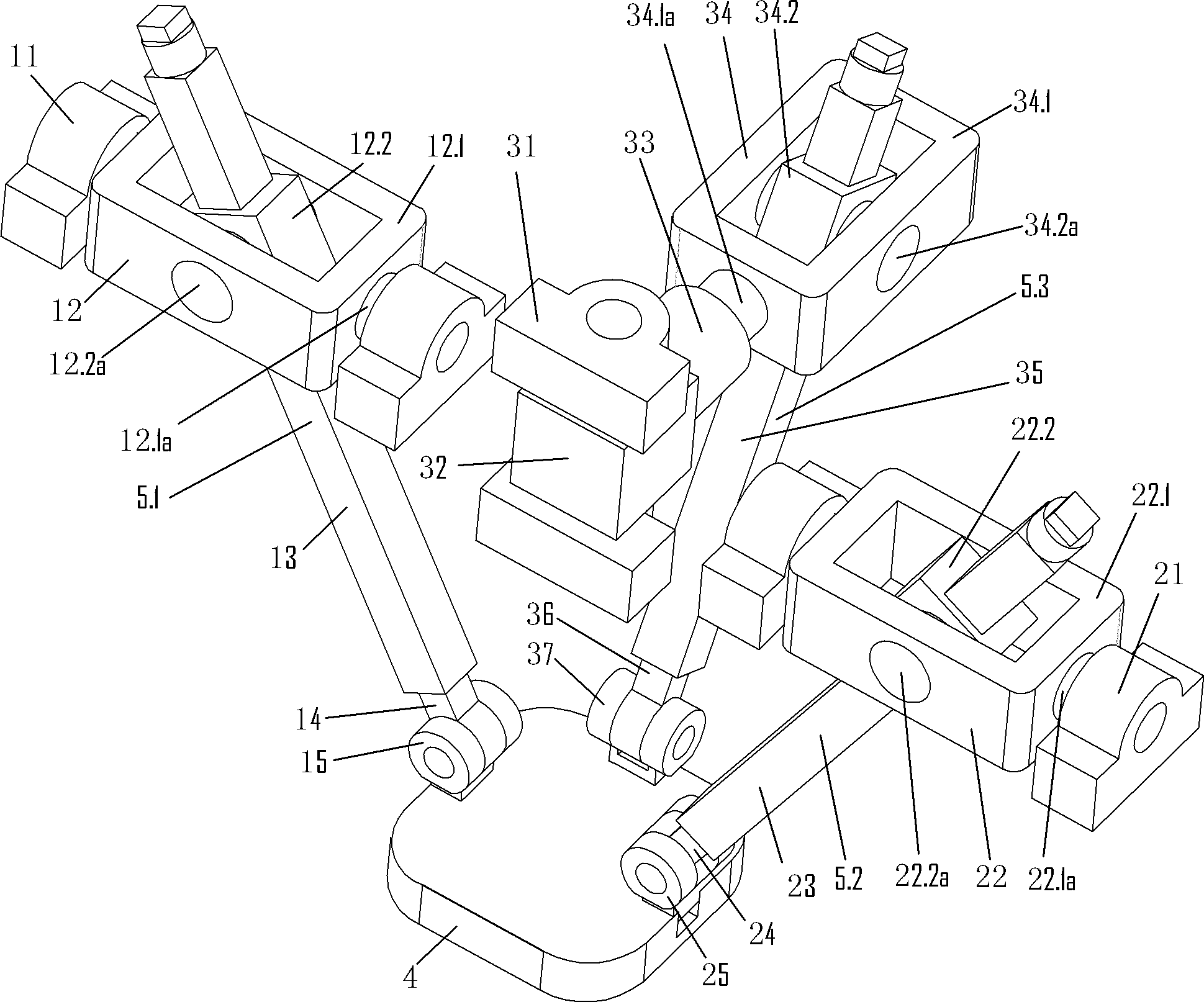
[0044] This example figure 2 As shown, the structure is basically the same as in Embodiment 1; the difference is only:
[0045] In Embodiment 1: the axis of the first rotating pair 32 in the third branch is collinear with the axis of the outer rotating shaft 12.1a of the universal hinge 12 in the first branch and the axis of the outer rotating shaft 22.1a of the universal hinge 22 in the second branch and, in the third branch, the axis of the first rotating pair 32 is perpendicular to the axis of the outer rotating shaft 34.1a of the universal hinge 34; the axis of the inner rotating shaft 34.2a of the universal hinge 34 is parallel to the axis of the second rotating pair 37 and is perpendicular to to the external axis of rotation 34.1a of the hinge 34;
[0046] In Embodiment 2: the axis of the first rotating pair 32 in the third branch is perpendicular to the axis of the outer rotating shaft 12.1a of the universal hinge 12 in the first branch, and the outer rotating shaft 2...
Embodiment 3
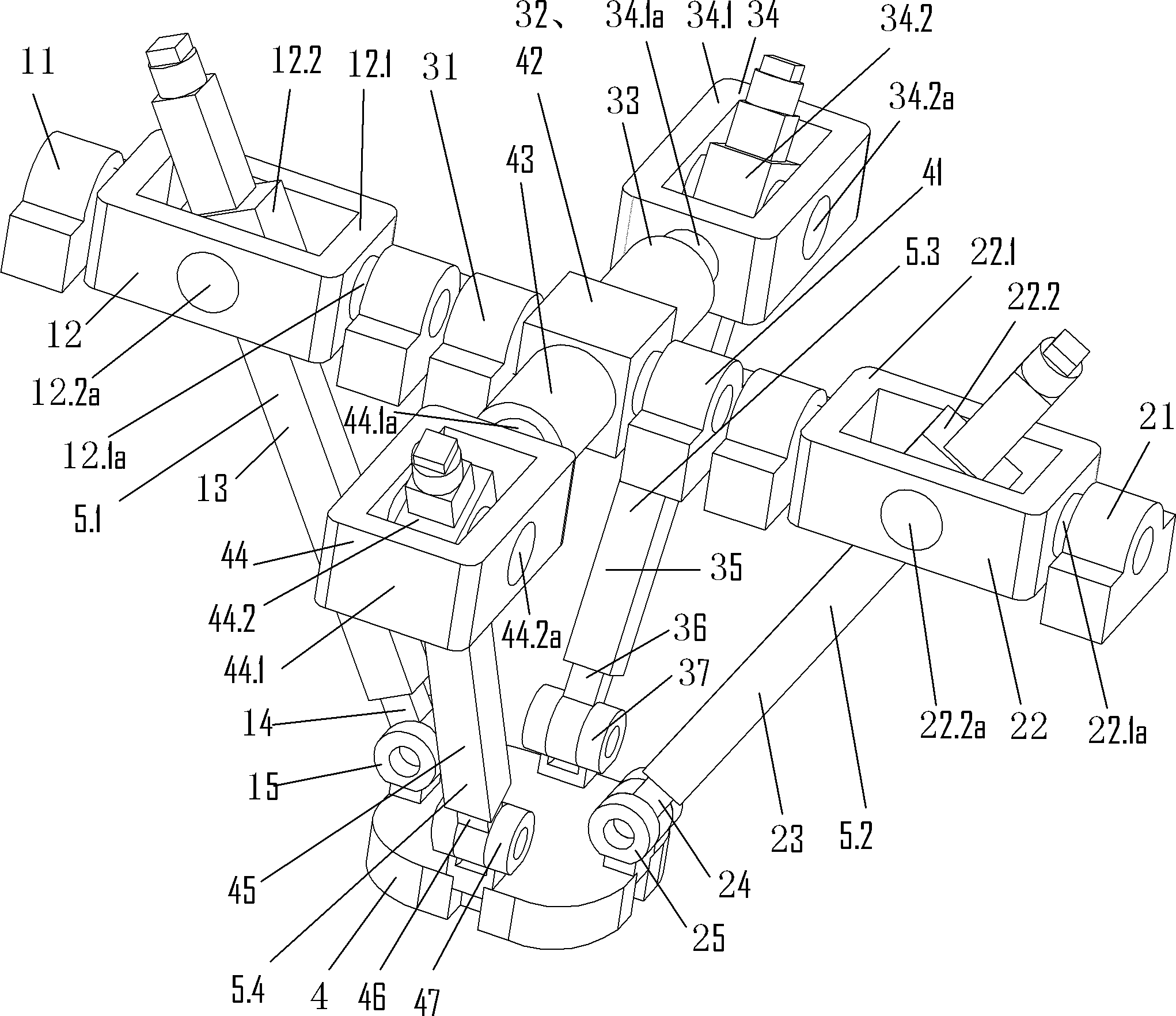
[0048] image 3 As shown, the moving platform 4 is connected in parallel with the frame 11, the frame 21, the frame 31, and the frame 41 through four branches; in the first branch 5.1, the frame passes through the universal hinge 12 successively (the universal hinge includes installation An external rotating element 12.1 rotating around an external rotating shaft 12.1a on the frame and an internal rotating element 12.2 mounted on the external rotating element rotating around an internal rotating shaft 12.2a), a moving pair 13, a connecting rod 14, and a rotating pair 15 Connected with the moving platform 4; in the second branch 5.2, the frame passes through the universal hinge 22 in turn (the universal hinge includes an external rotating element 22.1 mounted on the frame and rotating around the external rotating shaft 22.1a and mounted on the external rotating element The internal rotating element 22.2 rotating around the internal rotating shaft 22.2a), the moving pair 23, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More