AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A servo-driven, rapier loom technology, applied in looms, textiles, textiles and papermaking, etc., can solve the problems of inability to adjust the stroke freely, inconvenient process adjustment, single weaving varieties, etc., and achieves convenient maintenance and excellent mechanical structure. Simple, reliable, high-strength results
Active Publication Date: 2013-09-04
JIANGSU S&S INTELLIGENT SCI & TECH CO LTD
View PDF7 Cites 1 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
At present, the mechanical structure of rapier looms is mainly based on connecting rods or cams. Since the structure used has been solidified and does not have adjustability, the loom is highly specialized and has a single weaving variety.
The warp let-off and high-end curling of the loom are basically driven by servo motors, that is, the so-called electric transmission and electric coiling, while the beating-up and weft insertion are completed by ordinary motors driving conjugate cams or linkages, resulting in beating-up and weft insertion of the loom. The structure is solidified, the stroke cannot be adjusted freely, the process adjustment is inconvenient, and it is not easy to maintain
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
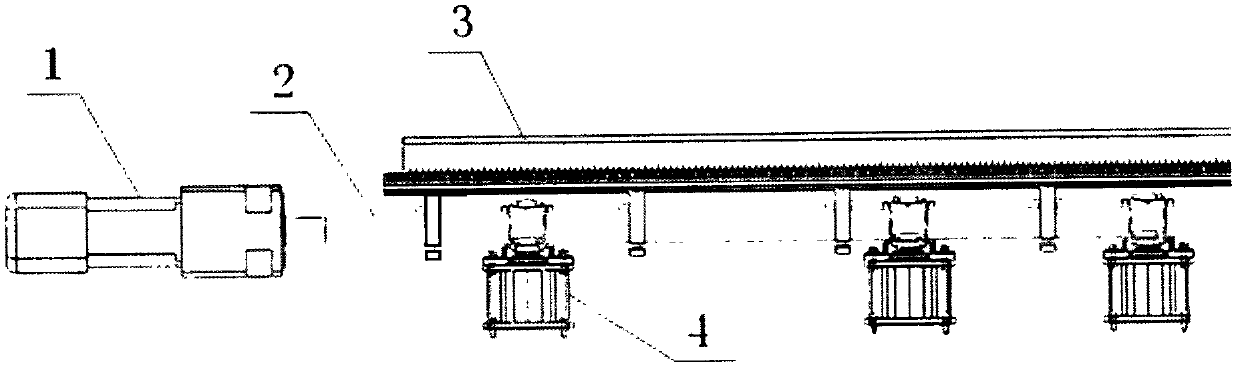
[0019] attached figure 1 The medium motor adopts 8KW3000r / min large inertia servo motor (1) as the main force for beating-up operation; the servo motor (1) is controlled by the main control unit, and the position information is fed back to the main control unit through the encoder to realize the motor’s Accurate positioning, the servo motor (1) as the main motor can freely adjust the beating angle each time to meet the requirements of different fabrics. The beating shaft (2) is connected with the main shaft of the servo motor (1), and is directly driven by the servo motor (1), and drives the steel buckle (3) fixed on it to swing back and forth to complete a beating cycle. The shaft support seat (4) fixes the beating-up shaft (2).
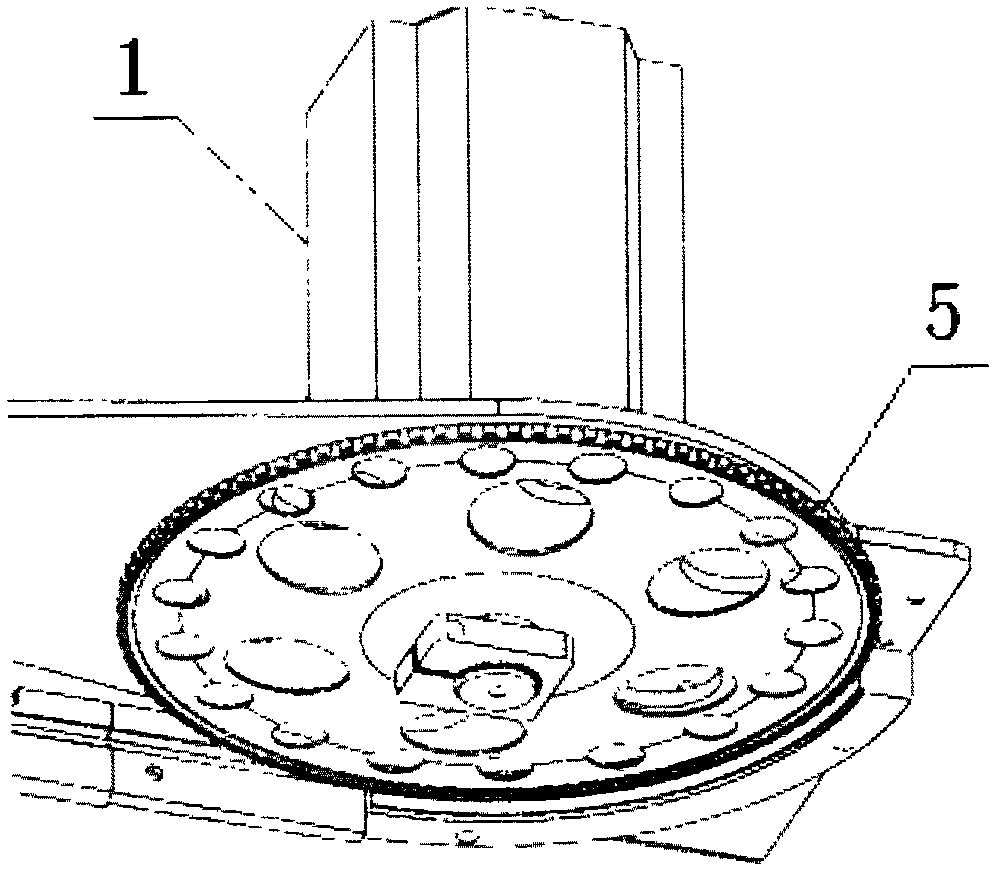
[0020] exist figure 2 Among them, the motor adopts a 4.7KW3225r / min large inertia servo motor (1), and the servo motor (1) is directly driven by the main control unit, which can realize the weft insertion operation according to a custom curve, a...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to the field of spinning equipment, in particular to a fully-independent servo drive rapier loom which comprises an electronic yarn letting-off part, an electronic taking-up part, an electronic beating-up part and an electronic weft insertion part, and is mainly composed of a servo motor, a beating-up shaft, a steel buckle, a beating-up shaft support seat, a rapier belt wheel, a speed reducer, a gear, a yarn letting-off shaft, a cloth roller and a servo motor shaft. The fully-independent servo drive rapier loom is characterized by being controlled by full servo, the weft insertion, beating-up, yarn letting-off and rolling of the loom are completely driven by a servo driver and are accurately located, the whole loom works by cooperation of a main control unit, a high-performance servo system can provide flexible, convenient, accurate and rapid drive, and complex linkage and digital interlocking are carried out in the electric aspect; and compared with the conventional loom, the fully-independent servo drive rapier loom has the advantages of convenience in process regulation, simplicity, reliability, no quick-wear part and maintenance cost saving, and is suitable for all fields in the spinning industry.
Description
Technical field [0001] The invention relates to the field of textile equipment, in particular to a fully independent servo-driven rapier loom. Background technique [0002] The rapier loom is currently the most widely used shuttleless loom. In addition to the characteristics of high speed, high degree of automation, and high-efficiency production of the shuttleless loom, its positive weft insertion method has strong variety adaptability and can adapt to The weft insertion of various yarns, and the rapier loom also has obvious advantages in multi-color weft weaving, and can produce yarn-dyed products with up to 16 color weft yarns. As shuttleless looms replace shuttle looms, rapier looms will become the main production machine for woven fabrics. At present, the mechanical structure of rapier looms is mainly based on connecting rods or cams. Since the adopted structure has been solidified and does not have adjustability, the specificity of the loom is strong, and the weaving ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More