

Six-degree of freedom parallel mechanism based on different radii
A degree of freedom and parallel technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of heavy weight, large size, and poor fidelity of force perception, and achieve reduced space, compact distribution, and small interference. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] 1. Layout and connection method
[0035] The present invention provides a six-degree-of-freedom parallel mechanism based on different radii for a six-degree-of-freedom force-sense human-computer interaction device, which has six degrees of freedom in motion.
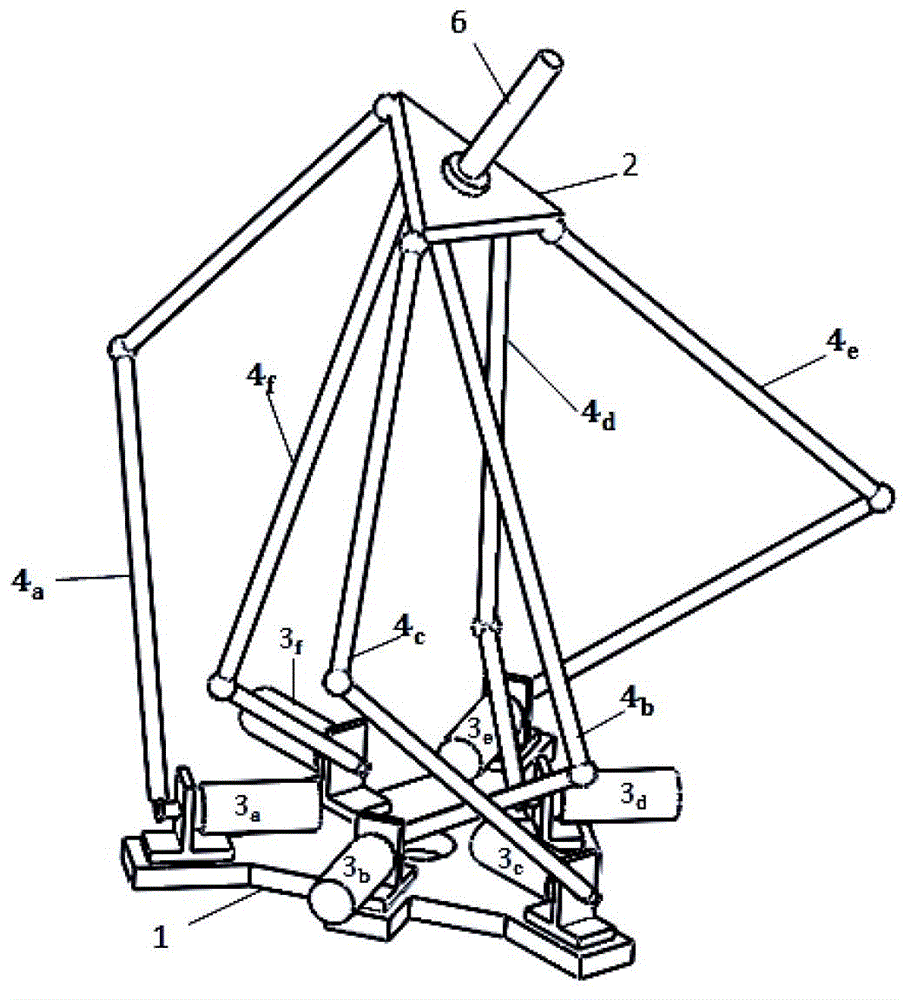
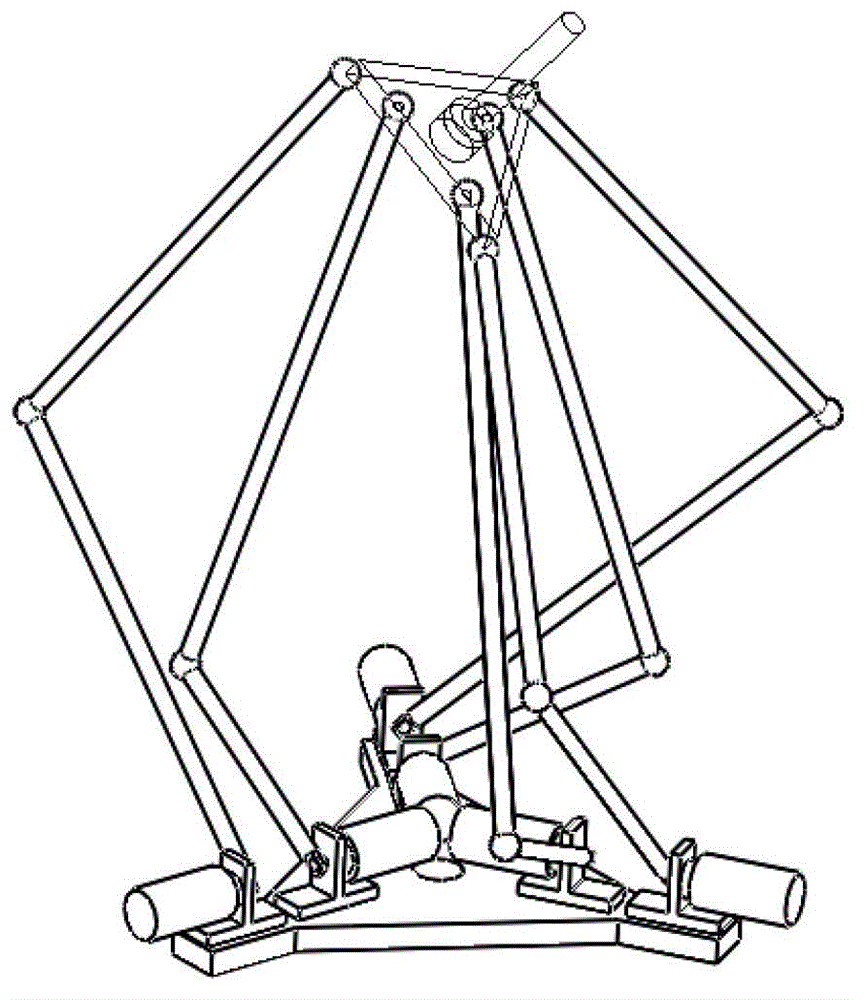
[0036] Such as figure 1 As shown, a six-degree-of-freedom parallel mechanism based on different radii in the present invention consists of a static platform 1, a moving platform 2, and a first branch chain 4 a , the second branch 4 b , the third branch 4 c , the fourth branch 4 d , the fifth branch 4 e , the sixth branch 4 f , the first branch chain motor 3 a , the second branch chain motor 3 b , the third branch chain motor 3 c , the fourth branch chain motor 3 d , the fifth branch chain motor 3 e , the sixth branch chain motor 3 f , six lower ball joints C 1 、C 2 、C 3 、C 4 、C 5 、C 6 , six upper ball joints B 1 , B 2 , B 3 , B 4 , B 5 , B 6 It is composed of six support frames A, B, C, D, E...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More