

No-signal intersection vehicle and vehicle cooperative collision prevention system
A collaborative collision avoidance and intersection technology, applied in the direction of collision avoidance system, etc., can solve the problem that the ranging sensor cannot detect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
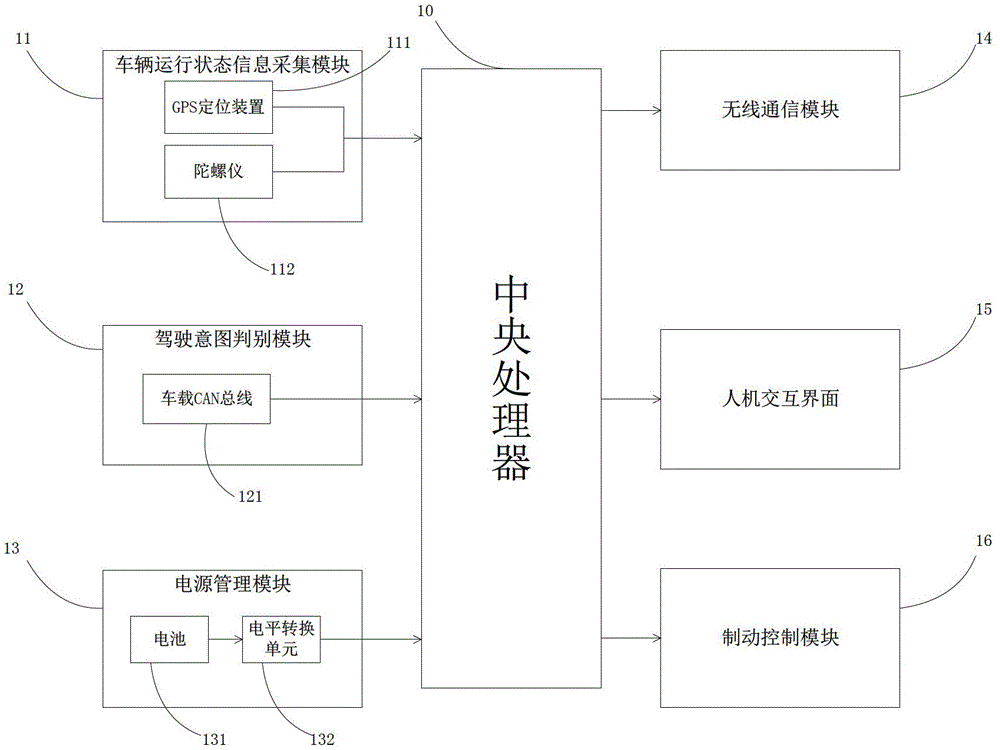
[0019] The invention is a vehicle-vehicle cooperative collision avoidance system at an unsignalized intersection. Based on vehicle-to-vehicle communication, the system judges potential collisions by acquiring motion state parameters of the own vehicle and surrounding vehicles. If there is a potential collision, the system will send a warning message to the driver and slow down or stop the vehicle to avoid the collision.
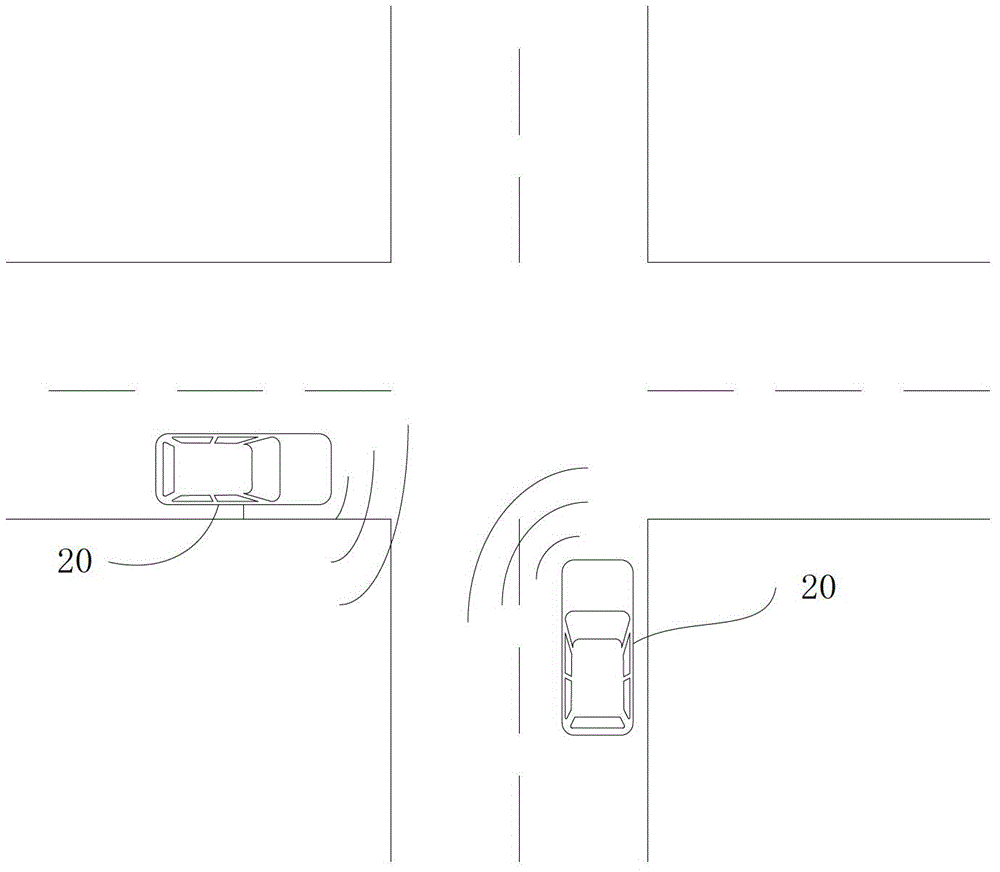
[0020] Such as figure 1 The intersection without signal lights shown is a typical application scenario of the vehicle-vehicle interactive cooperative collision avoidance system. The vehicle 20 broadcasts its own running status and driving intention information through the wireless communication module 14 . Within a certain range, the vehicle can receive information from other vehicles through the wireless communica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More