

Steering automation operating system and control method for a dual-drive non-steering wheel vehicle
An automatic control and steering wheel technology, applied in the direction of automatic steering control components, steering mechanisms, steering rods, etc., can solve the problems of inconvenience and easy misoperation, and achieve the effect of avoiding inconvenient manipulation and misoperation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
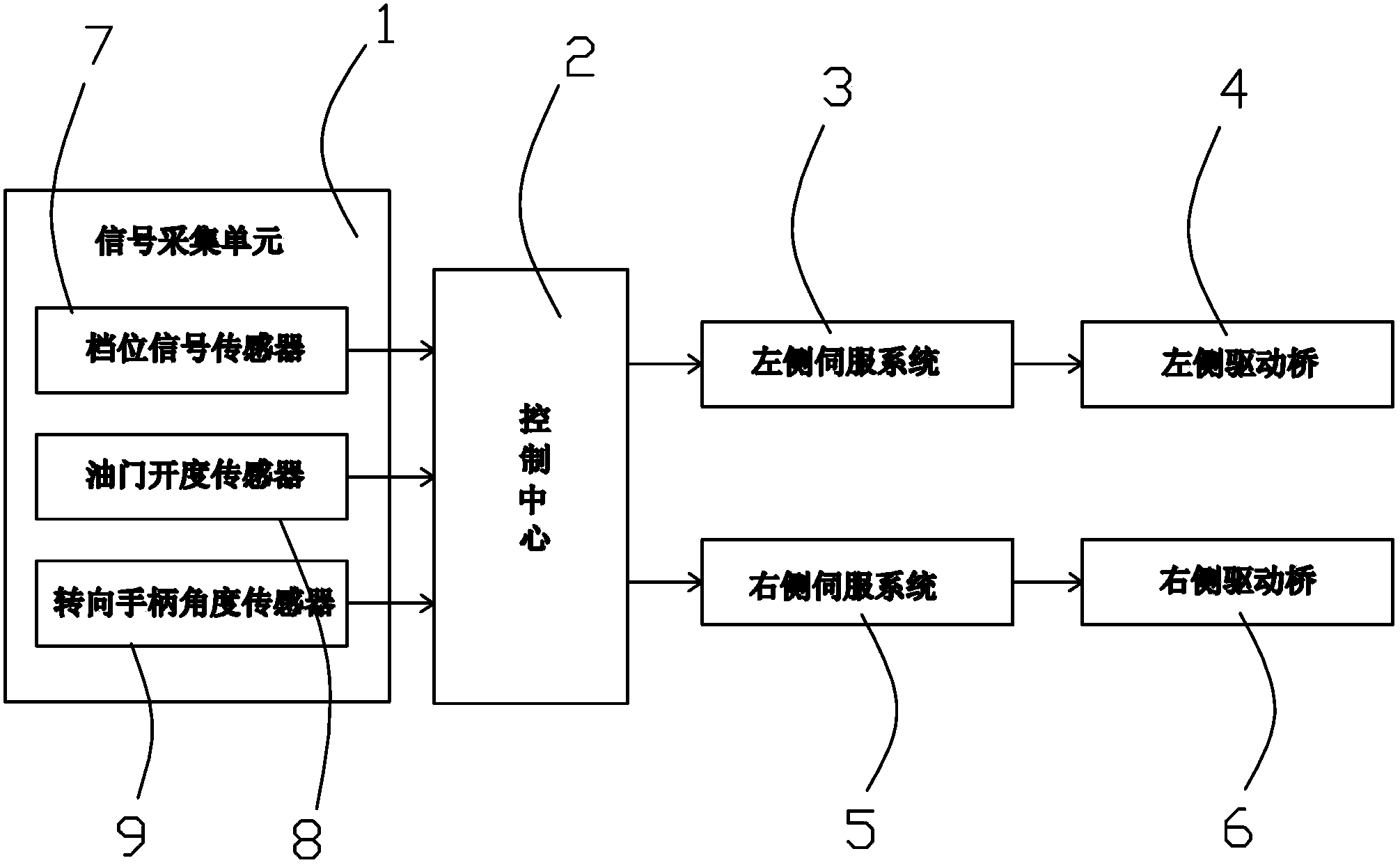
[0033] This embodiment is a steering automation operating system for a dual-drive non-steering wheel vehicle. The dual-drive non-steering wheel vehicle includes left non-steering wheels and right non-steering wheels arranged in the left and right rows. The devices are interlocked, and the linkage is connected with the left wheel half shaft; the right non-steering wheel is linked through the linkage, and the linkage is connected with the right wheel half shaft. Such as figure 1 As mentioned above, the steering automation operating system of a dual-drive non-steered wheel vehicle includes a left drive axle 4, a right drive axle 6, a left servo system 3, a right servo system 5, a control center 2 and a signal acquisition unit 1, and the left The half shaft of the non-steering wheel is connected to the left drive axle 4, the half shaft of the right non-steering wheel is connected to the right drive axle 6, and the left drive axle and the right drive axle are respectively connected...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More