

Online trajectory planning based efficient bridge crane swing elimination control method
A technology of overhead crane, trajectory planning, applied in the direction of load hanging components, transportation and packaging, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0151] 1. Trajectory planning
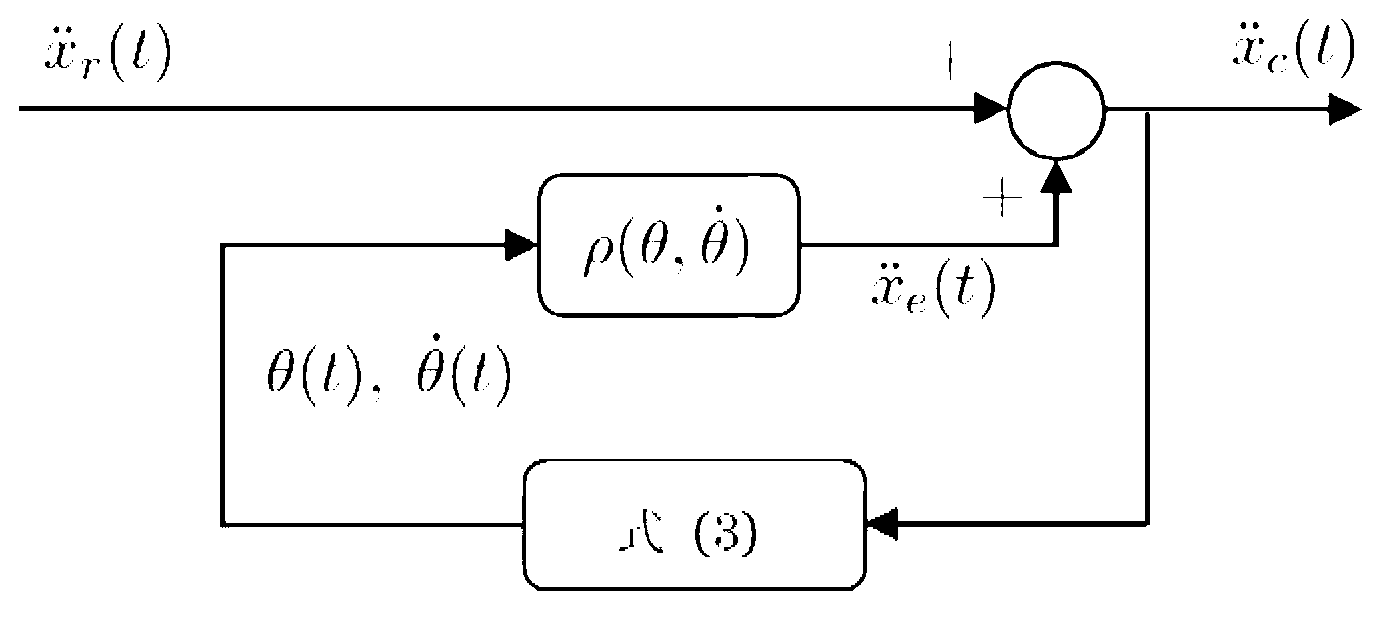
[0152] Due to the underactuated characteristics of the overhead crane, it is impossible to plan the motion of the load, so the trajectory planning method of the conventional industrial robot is not suitable for the crane system; therefore, a new online trajectory planning scheme for the overhead crane is proposed; The trajectory consists of two parts. The first part should ensure the positioning performance of the trolley, and the second part needs to effectively suppress and eliminate the load swing angle, and it cannot affect the positioning performance of the trolley. Based on this, the final planning (acceleration ) trajectory has the following expression:
[0153] x · · c ( t ) = x · · r ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More