

Method capable of automatically eliminating motion accumulated error of robot
A technology of robot motion and accumulating errors, applied in manipulators, manufacturing tools, etc., can solve the problems of deviation between the actual motion trajectory of the robot and the theoretical motion trajectory, blocking the continuity of processing operations, affecting the efficiency and accuracy of production and processing, etc. Achieve the effect of ensuring uninterrupted continuous operation, ensuring continuity and efficiency, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
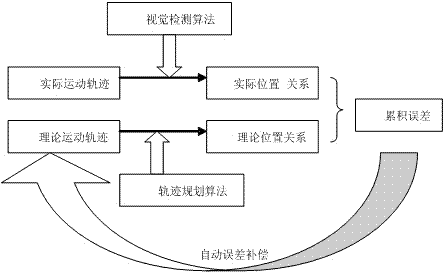
[0022] During the processing operation of the robot, its movement trajectory is controlled by a preset motion control program. Generally, after the robot has been working for a period of time, it will deviate from the original movement trajectory, making it difficult for the robot and the workpiece to always maintain the same position. In order not to affect the processing operation, it is necessary to reposition the zero position of the robot to eliminate the cumulative error of the robot movement. The zero calibration in the prior art needs to shut down the robot first, and then perform the zero calibration after making it stop working, which leads to the interruption of the processing operation and affects the continuity and high efficiency of the processing operation. The present invention aims at the defects of the existing technology, based on the fact that the motion of the robot is the essential characteristic of the motion of each joint, and finds another way of thinki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More