

Isoline-based assistant navigation positioning method
A positioning method and technology for assisting navigation, applied in the field of navigation and positioning, can solve problems such as easy divergence, and achieve the effects of increasing reliability, improving matching accuracy, and high positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
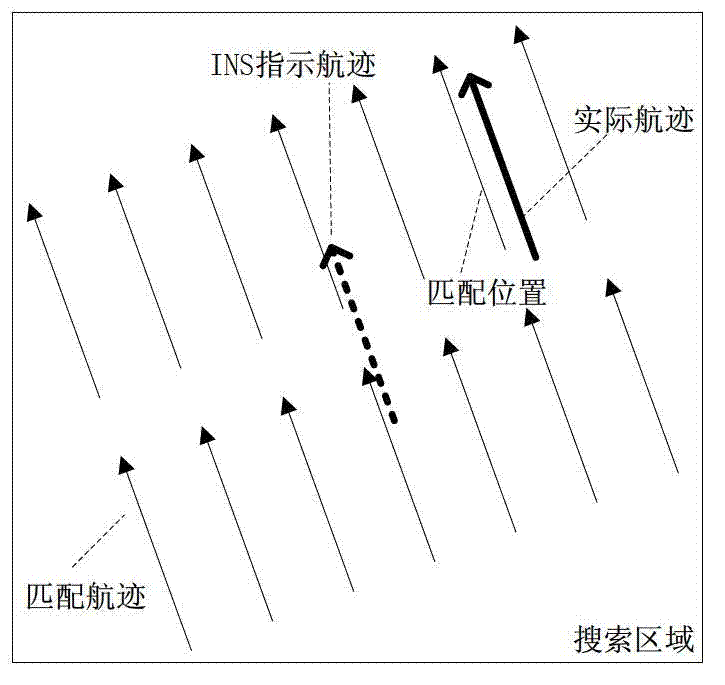
[0052] The simulation experiment uses a digital map with a resolution of 0.5′×0.5′ and a grid size of 72×82. Arbitrarily set a track as the actual track, and the INS indicated track is obtained by several translation transformations after the actual track is rotated by 15°. The initial matching position error in the latitude direction is 6.0′, and the sampling points of the ICCP algorithm are taken as is 9 o'clock, such as Figure 4 shown. The dotted square line in the figure is the actual track, the thick diamond line is the INS indicated track, and the thin diamond line is the matching track of the ICCP algorithm. Figure 5 For the final ICCP algorithm matching results, Table 1 shows the statistical results of ICCP matching errors when the initial position error is 6.0′.
[0053] Table 1
[0054]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More