

Kinect-based man-machine interaction method for two-arm robot
A human-computer interaction and robot technology, applied in the field of human-computer interaction, can solve the problems of unnatural communication of operation tasks and limitations of action commands.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The purpose of the invention of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments, and the embodiments cannot be repeated here one by one, but the implementation of the present invention is not therefore limited to the following embodiments. Unless otherwise specified, the materials and processing methods used in the present invention are conventional materials and processing methods in the technical field.
[0054] The invention provides a Kinect-based human-computer interaction method for a dual-arm robot, wherein the Kinect is a 3D somatosensory camera; comprising the following steps:
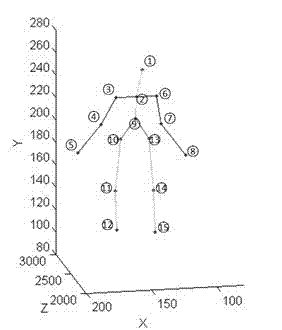
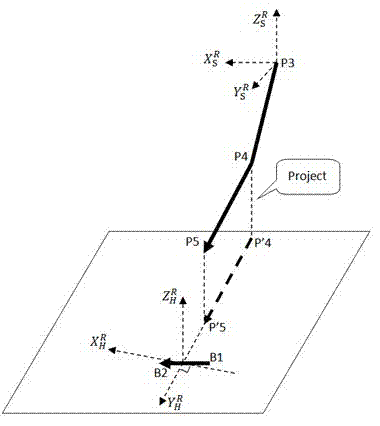
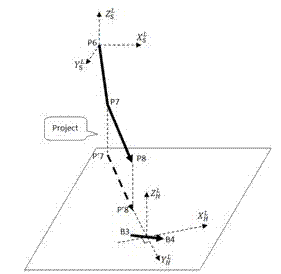
[0055] S1. Establish a coordinate system for the operator's arm through the 3D somatosensory camera;
[0056] S2, carry out skeleton extraction to operator's arm image by computer;
[0057] S3. Determine the positions of the index finger and the thumb through image analysis including the arm;
[005...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More