

Single-leg impact control experiment platform for robot
A technology for controlling experiments and robots. It is used in impact testing, testing of machine/structural components, measuring devices, etc. It can solve the problems of not being able to directly describe the robot, and that it cannot be tested with a single leg of the robot, and achieve the effect of simple structure and stable operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
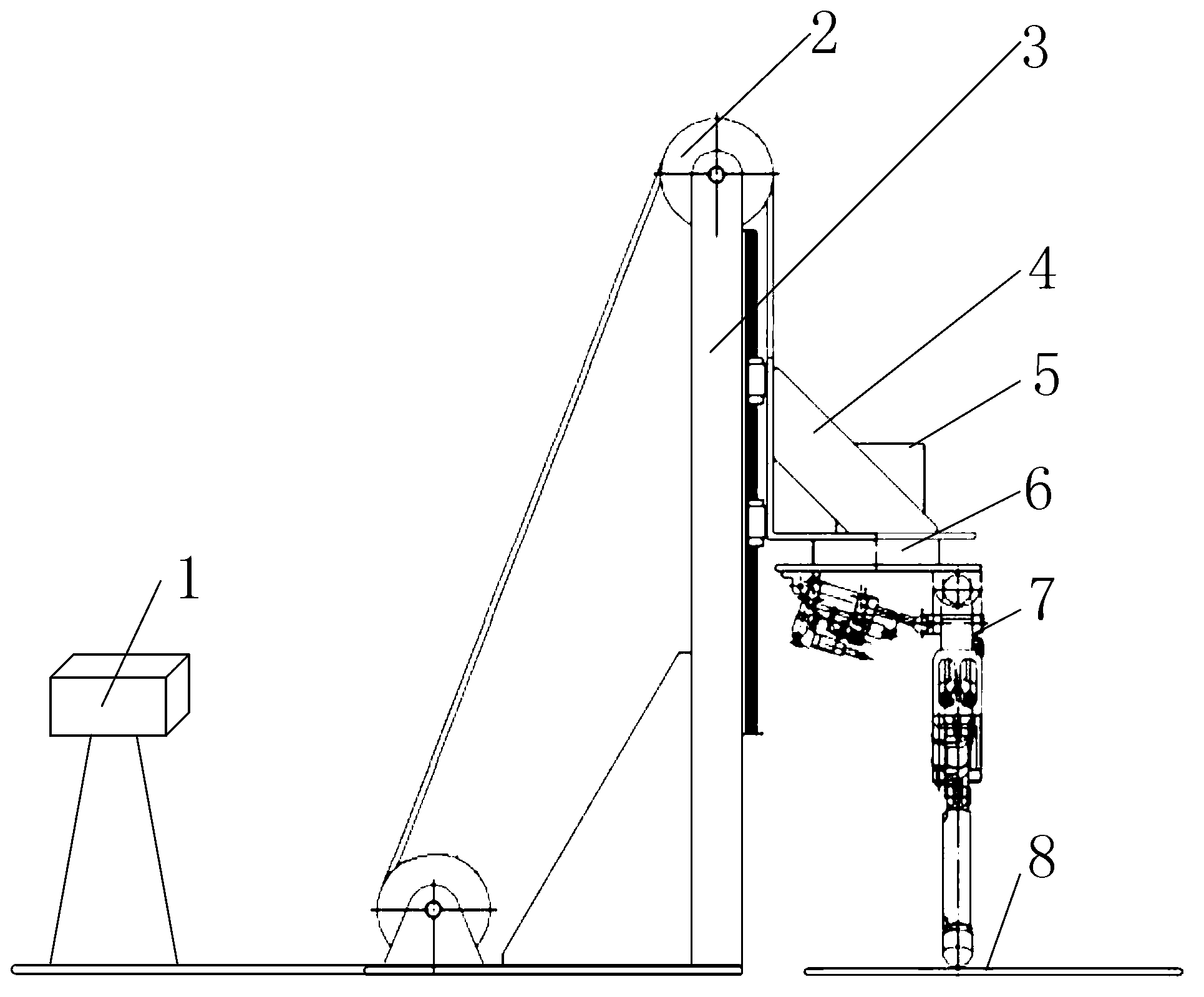
[0030] Such as figure 1 As shown, a robot single-leg impact control test platform includes an integrated controller 1, a robot leg lifting device 2, a test bench support 3, a static loading device 5, a six-dimensional force sensor 6, and a five-dimensional force test The platform 8, the test bench support 3 includes a test bench support column 10 and a test bench support base 9. The integrated controller 1 is fixed on the support base 9 of the test bench, and one end of the six-dimensional force sensor 6 is installed on the bottom support plate 21 of the robot leg connection bracket, and the other end is installed on the robot torso 28 . The five-dimensional force measuring platform 8 is fixed on the ground below the six-dimensional force sensor 6 .
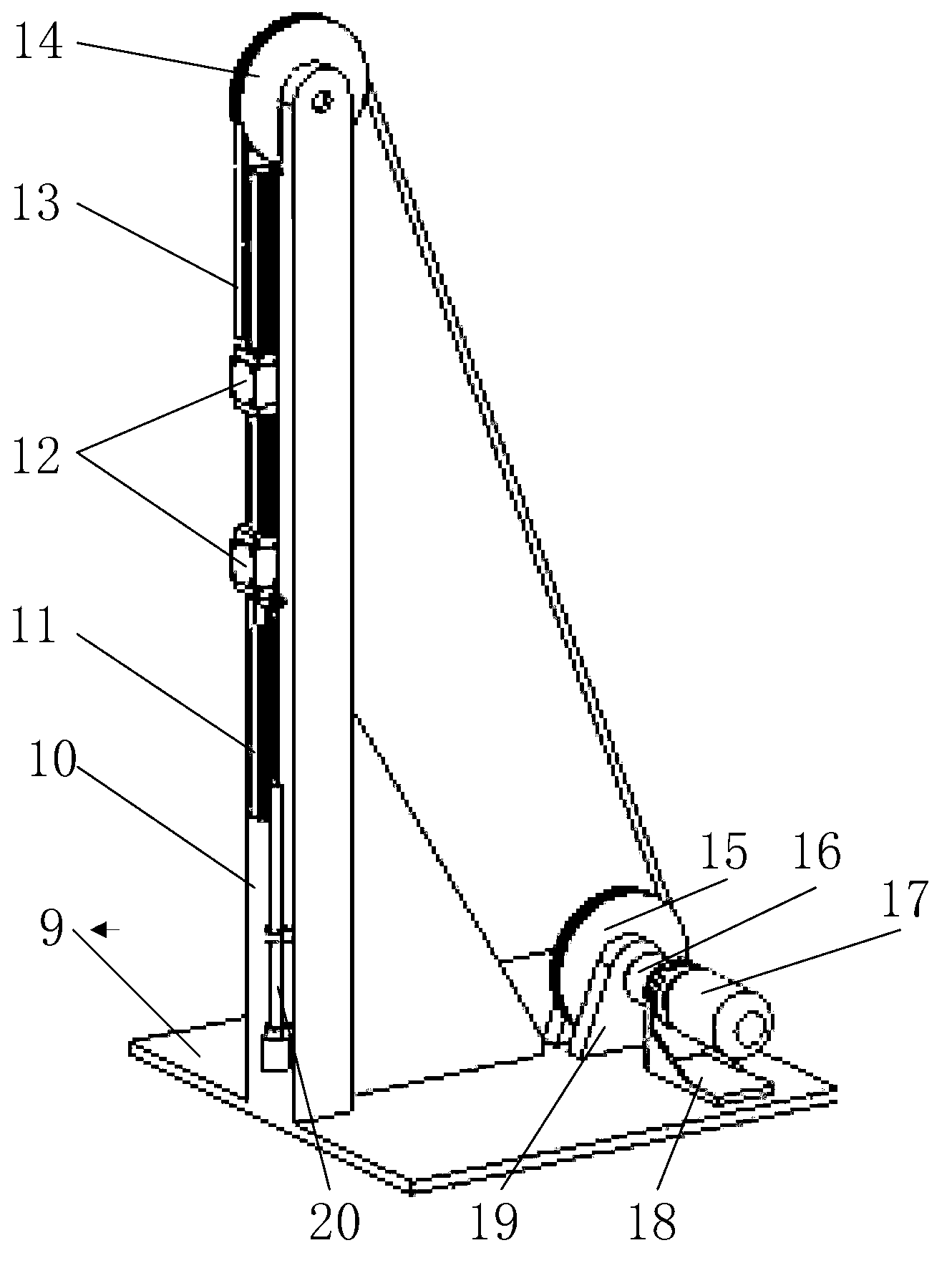
[0031] Such as figure 2 As shown, the robot leg lifting device 2 includes a fixed pulley 14, a stee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More