

Force/Torque Feedback Control Remote Manipulation System
A control system and feedback control technology, applied in the direction of manufacturing tools, manipulators, etc., can solve problems such as the inability to realize real-time feedback of the working force/torque of the joints at the end of the manipulator, and achieve improved maintenance effects, strong fault tolerance, and a high degree of intelligence. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
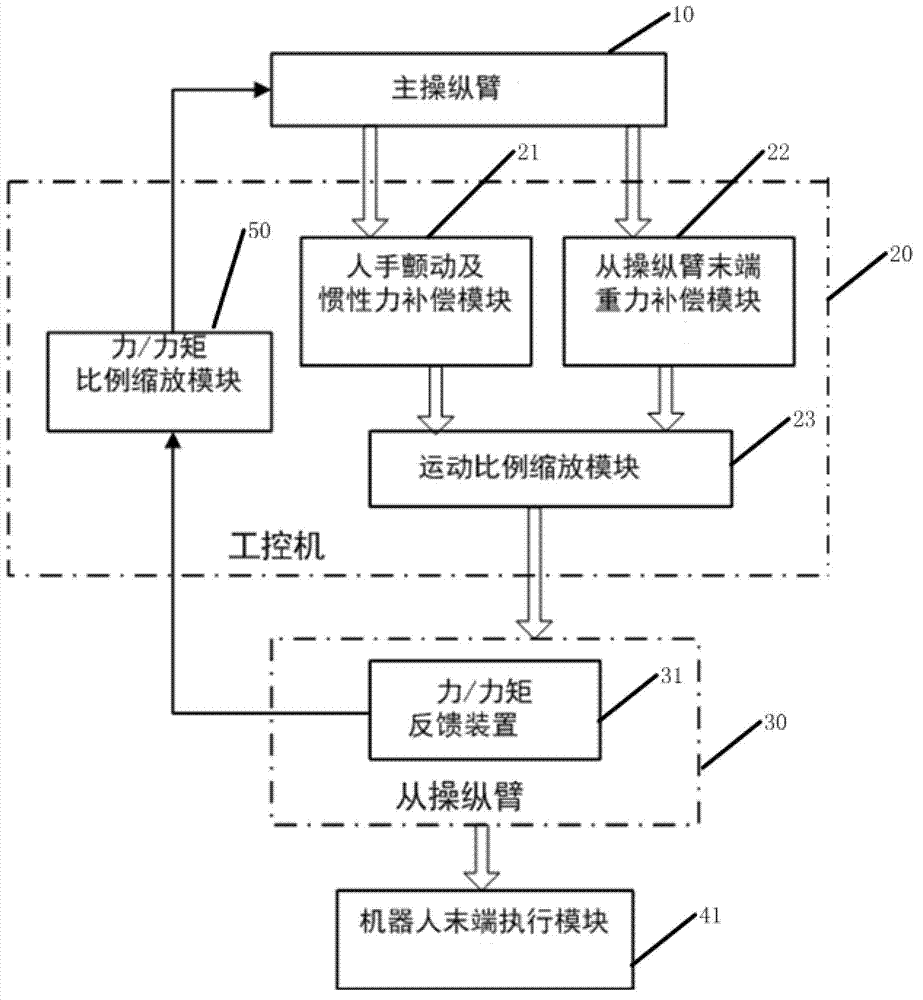
[0029] Such as figure 1 As shown, in this embodiment, the force / torque feedback control remote manipulation system provided according to the present invention includes: a master manipulator 10, an industrial computer 20, a slave manipulator 30 with a force / torque feedback device 31 and a robot end effector module 41. The industrial computer 20 includes a hand tremor and inertial force compensation module 21 , a gravity compensation module 22 at the end of the control arm, a motion scaling module 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More