

A-mode ultrasonic elastic imaging system based on mechanical scanning and method thereof
A mechanical scanning and imaging system technology, applied in echo tomography and other directions, can solve the problems that the tissue of interest cannot be accurately detected, the mechanical scanning positioning accuracy is low, and the axial resolution is not high enough, achieving a high degree of freedom and practicality. Strong performance and good imaging effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
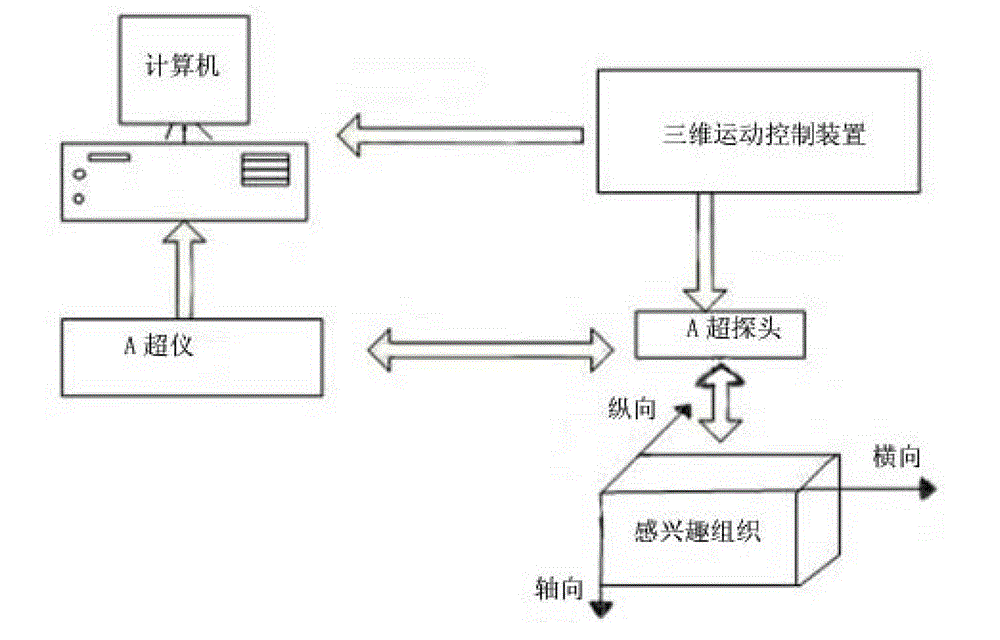
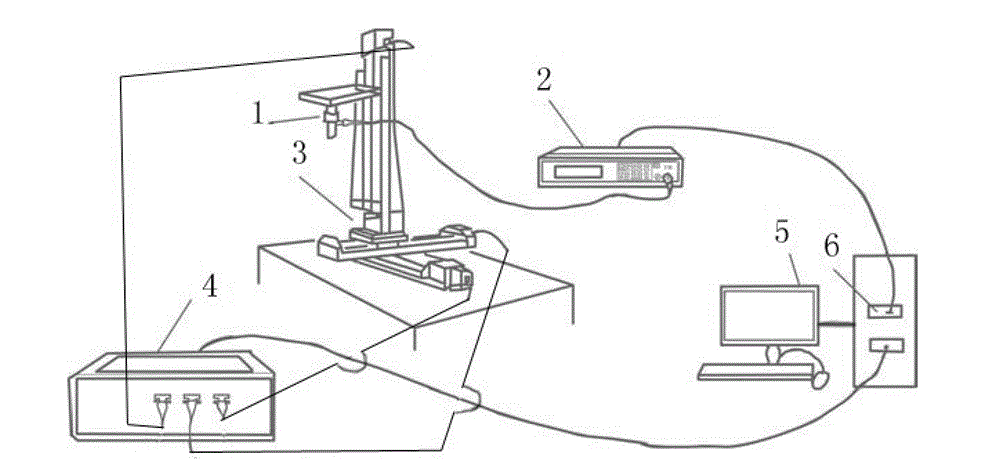
[0038] Such as figure 1 and figure 2 As shown, a mechanical scanning-based A superelastic imaging system includes a three-dimensional motion control device, an A-ultrasonic probe 1, an A-ultrasound instrument 2 and a computer that are electrically connected in turn, and the computer includes a display 5 and a host computer 6. The three-dimensional The motion control device includes a console 3 and a control box 4 , and the control box 4 is connected to a host computer 6 .
[0039] The control box 4 has output terminals in three directions of movement of X, Y and Z axes, and the console 3 has input terminals in three directions of movement of X, Y and Z axes. The X, Y and Z axes of the control box 4 The Z-axis output ends are respectively connected to the console X, Y and Z-axis input ends, the output ends are connected to the input ends through lead wires, the console has a stepping motor, and the bottom of the console is provided with a shock absorber, so The console inclu...
Embodiment 2
[0055] Such as figure 1 and figure 2 Shown, a kind of A superelasticity imaging system based on mechanical scanning comprises three-dimensional motion control device, A supersonic probe 1, A supersonic instrument 2 and computer that are electrically connected in turn, and said computer includes a monitor 5 and a host computer 6 connected to each other, The three-dimensional motion control device includes a console 3 and a control box 4 , and the control box 4 is connected to a host computer 6 .
[0056] The control box 4 has output terminals in three directions of movement of X, Y and Z axes, and the console 3 has input terminals in three directions of movement of X, Y and Z axes. The X, Y and Z axes of the control box 4 The Z-axis output ends are respectively connected to the console X, Y and Z-axis input ends, the output ends are connected to the input ends through lead wires, the console has a stepping motor, and the bottom of the console is provided with a shock absorber...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More