

Search and rescue system based on crawler robots
A technology of robots and reptiles, which is applied in the field of search and rescue systems based on reptile robots, can solve the problems of insufficient influence of wireless transmission signals in robot rescue systems, and achieve the effect of shortening the rescue time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
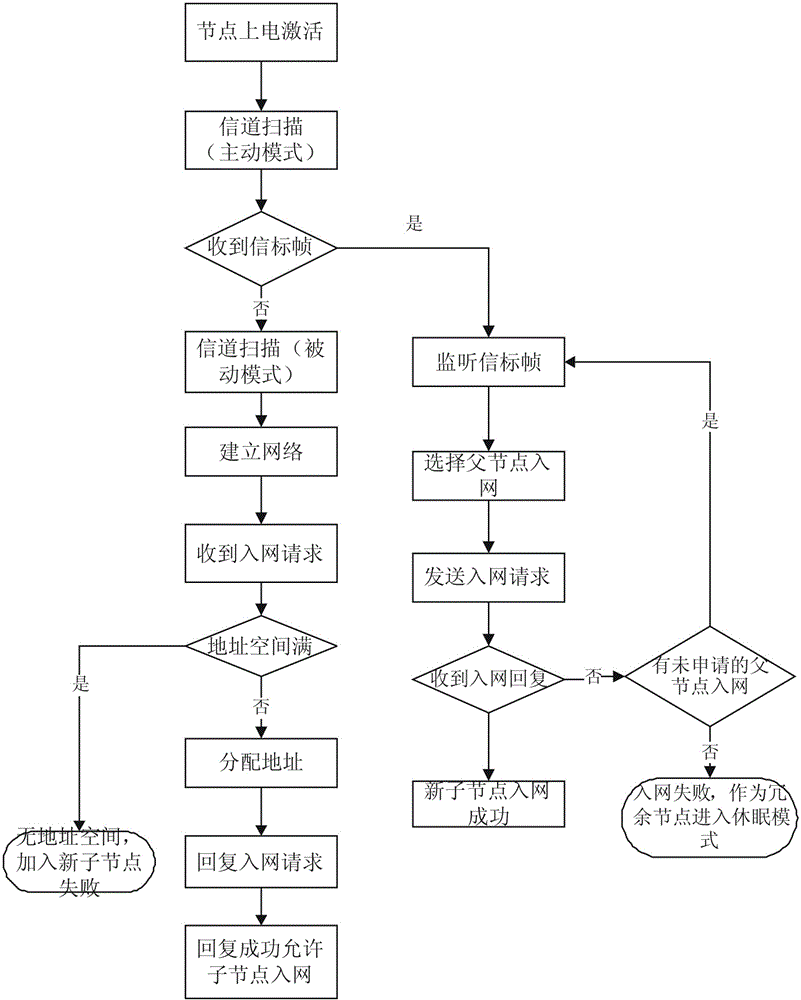
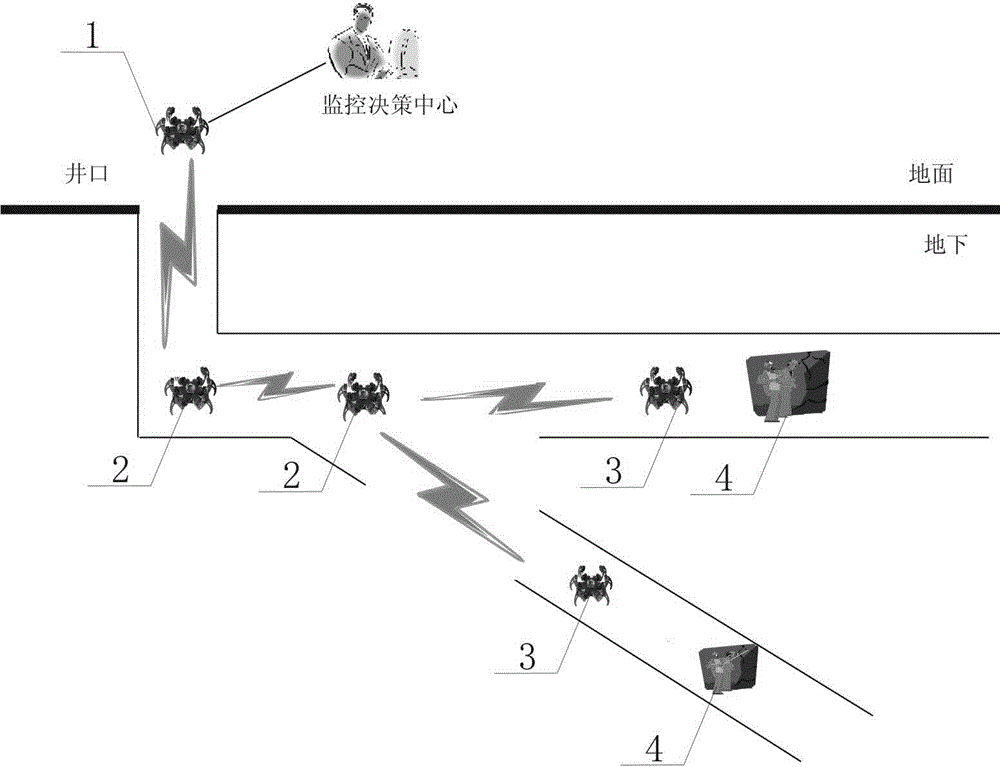
[0030] Embodiment 1: A search and rescue system based on reptile robots can be divided into three categories according to the type of ZigBee nodes they carry, namely tail-end robots (carrying ZigBeeCoordinator), relay robots (carrying ZigBeeRouter), front-end robots (carrying ZigBeeEndDevice ). Between multiple robots can follow the figure 1 The steps shown form a dynamic search and rescue network. When the first FFD device is activated, it first scans the default effective channel of the physical layer to detect interference. At the same time, the detected channels are sorted by energy value. Then perform an active scanning process to select an optimal channel as the current working channel. The coordinator is the first successfully established network node (in the MSSTATE_LRWPAN protocol stack, the coordinator node does not perform channel scanning during the network establishment process, and directly uses the designated channel for communication according to the design ...
specific Embodiment approach 2
[0032] Specific implementation mode two: use the system to realize the recognition and positioning of the state of the trapped person. Such as image 3 In the robot search and rescue network shown, the front-end robot carries an infrared thermal imager. When the robot is searching, it can take infrared images from time to time, and the relay robot can receive all the information obtained by the front-end robot through various sensors or infrared devices. , The monitoring center can further understand the posture of the trapped underground people and the surrounding environment information based on the infrared image. The positioning between robot nodes adopts the combination of RSSI positioning of ZigBee and underground RFID-assisted positioning. After ZigBee establishes the basic network, the distance calculation is performed by the size of the RSSI value received by the node, and then the position of the positioning node (blind node) is calculated by the distance and the po...
specific Embodiment approach 3
[0033] Specific implementation mode three: use the system to complete voice intercom. The crawling robot has a switch between search and rescue mode and voice mode. The robot is in the search and rescue mode when it starts working, and it tries to build a Bluetooth network during the search and networking process, and records the location where the construction failed. When the robot finds a person in distress, it transmits the image information of the scene to the client, and the client determines Whether to switch to voice mode to communicate with the victims on the scene. Complete the unfinished Bluetooth network by supplementing the relay robot. The search and rescue mode can be implemented according to the aforementioned ZigBee networking strategy. Considering the limited bandwidth of ZigBee, the voice mode is implemented here using Bluetooth voice communication technology. Microphones and audio power amplifiers are integrated on the front-end robot carrying the ZigBee ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More