

Pull rod type suspended robot wheel leg walking mechanism
A walking mechanism and robot technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve problems such as difficult to land on the left and right wheels at the same time, weak flexibility and obstacle-crossing ability, poor adaptability to stones and slopes, etc. The effect of improving maneuverability and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
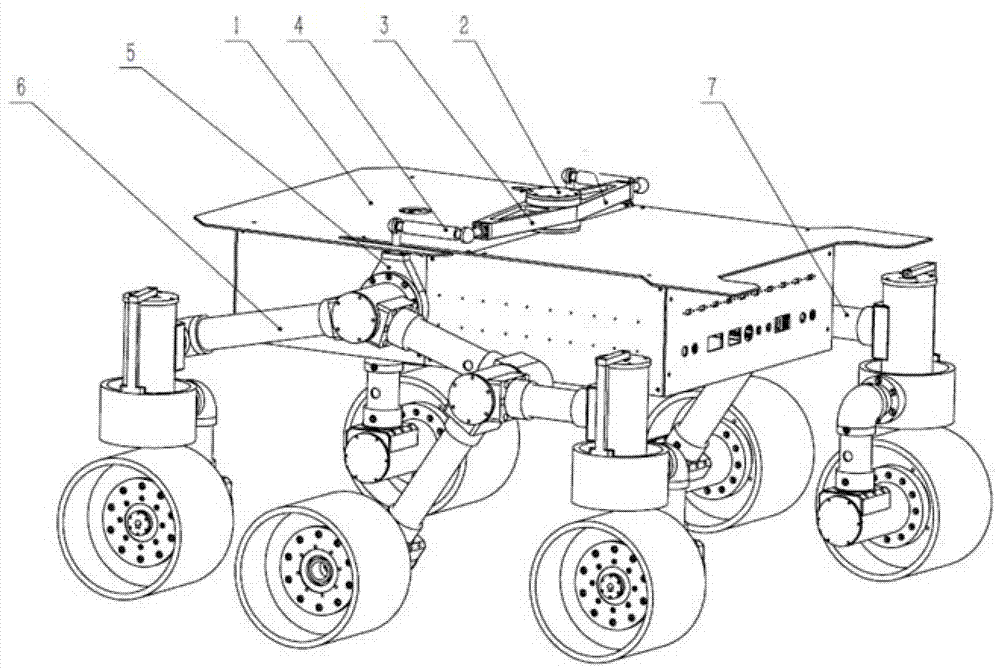
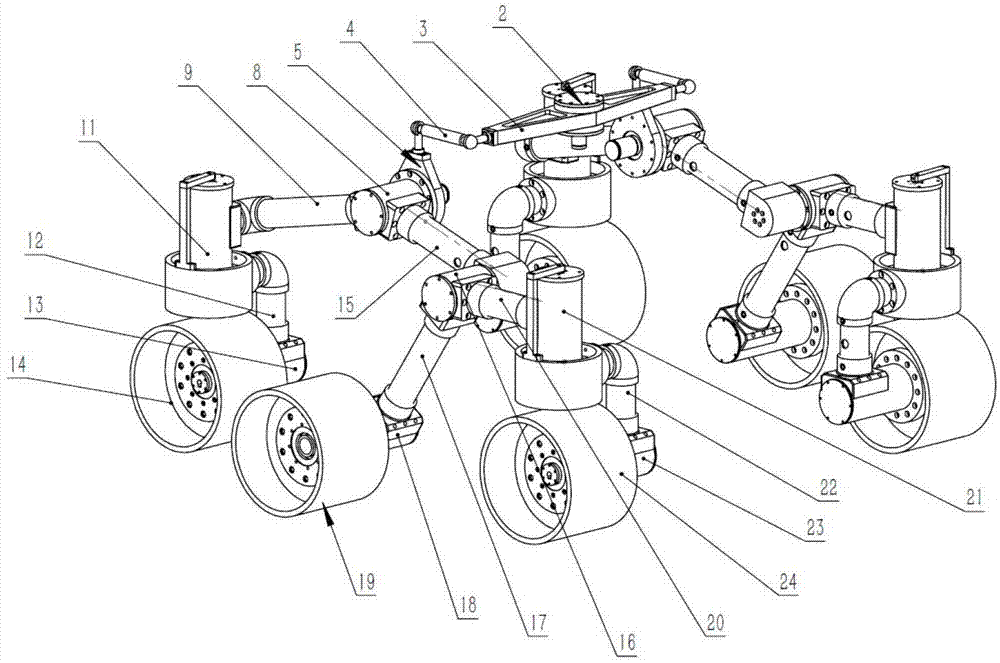
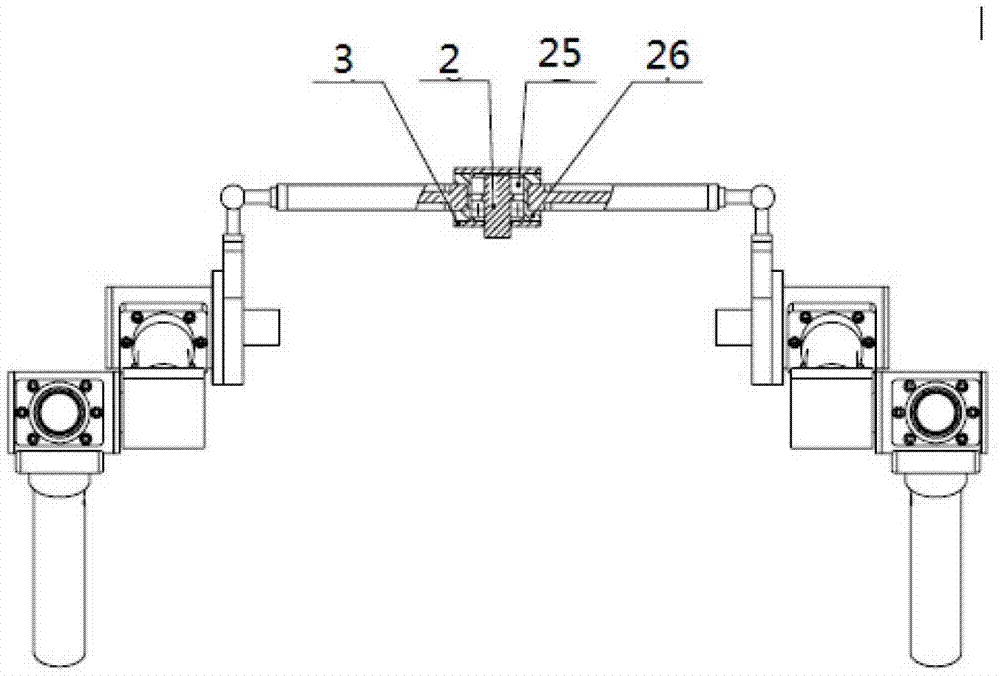
[0032] Such as figure 1 , figure 2 As shown, a robot wheel-leg walking mechanism with a tie-rod suspension includes: vehicle frame 1, a pull-rod rocker differential suspension system, a left wheel-leg system and a right wheel-leg system, and the pull-rod rocker differential suspension system includes a rotating arm Components, left and right pull rods 4, left and right rocking arms 5 and some ball chains, the rotating arm assembly includes an intermediate rotating shaft 2 and a rotating arm 3. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More