

Multi-rotor unmanned aerial vehicle pose acquisition method based on markers in shape of large and small square
A technology of a multi-rotor unmanned aerial vehicle and an acquisition method, which is applied in the field of multi-rotor unmanned aerial vehicle position and attitude acquisition based on large and small characters markers, can solve the problems of inaccurate positioning of the unmanned aerial vehicle, large error, and high IMU price.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0048] Apply the multi-rotor UAV position and attitude acquisition method based on the large and small back characters markers of the present invention to the automatic battery replacement system for the UAV to obtain the position and posture accurately and land by this method.
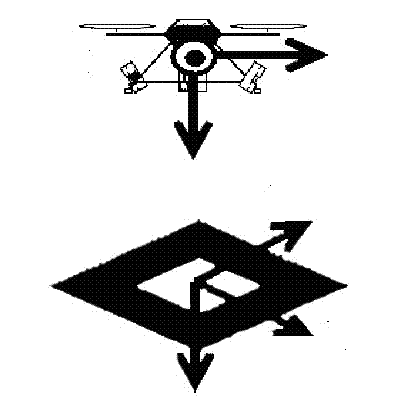
[0049] figure 1 As shown, the small multi-rotor UAV includes: motor drive part, CCD camera, wireless transmitting / receiving device, battery compartment, main control board, and landing gear. The ground includes: ground control station, wireless transmitting / receiving device, and markers marked with big and small characters.
[0050] Below the main control board in the middle of the small multi-rotor drone is the battery compartment, and under the battery compartment is the CCD camera. Around the main control board are motor drives and wireless transmitting / receiving devices, which are in contact with the ground through the landing gear as a whole. The CCD camera is controlled by the main control boa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More