

Humanoid hand in underactuation exquisite transmission structure
A transmission structure and human-like technology, which is applied in the field of humanoid robots, can solve the problems of large overall size and complex structure, and achieve the effect of simple and compact structure, small volume and fewer motors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
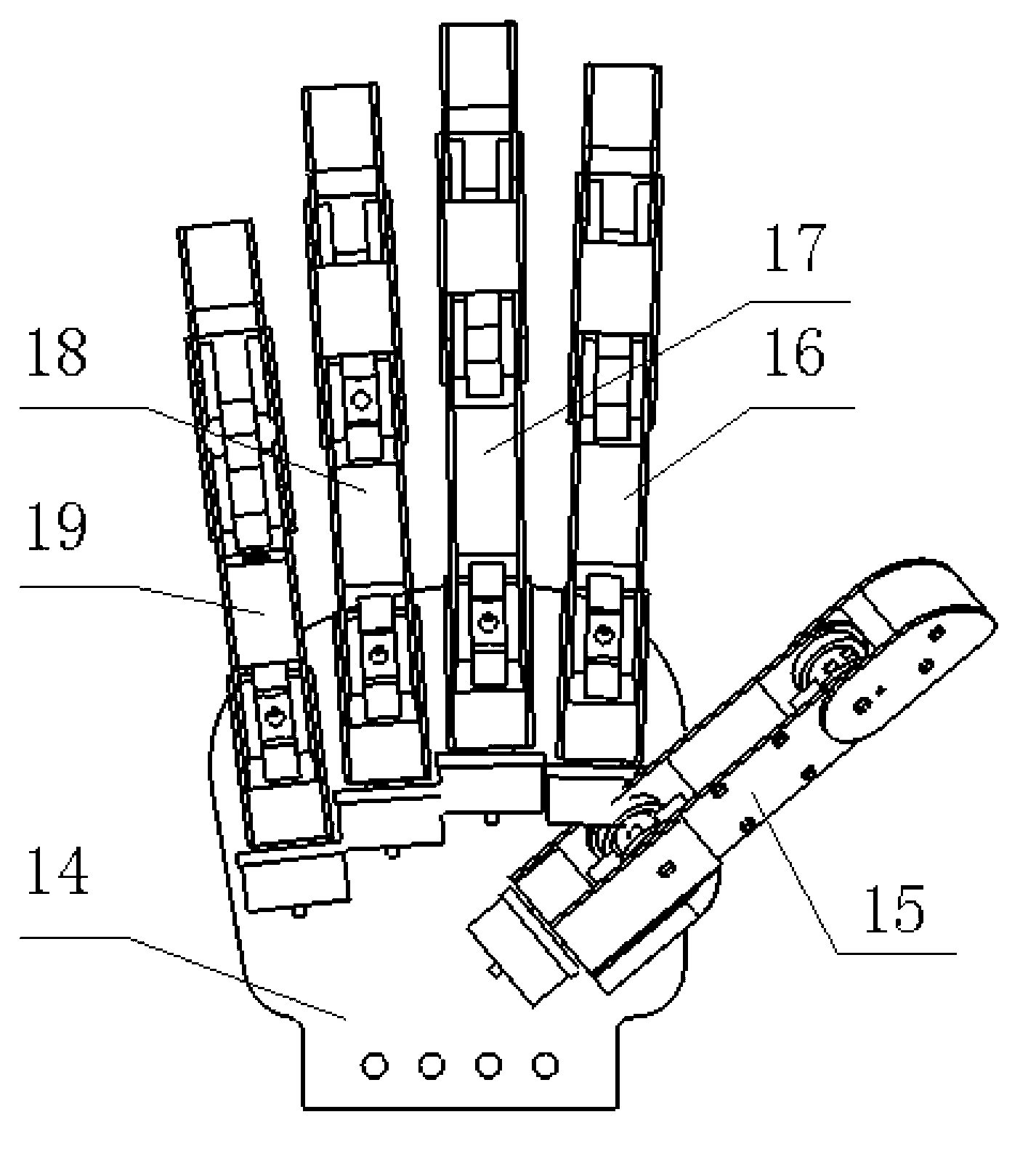
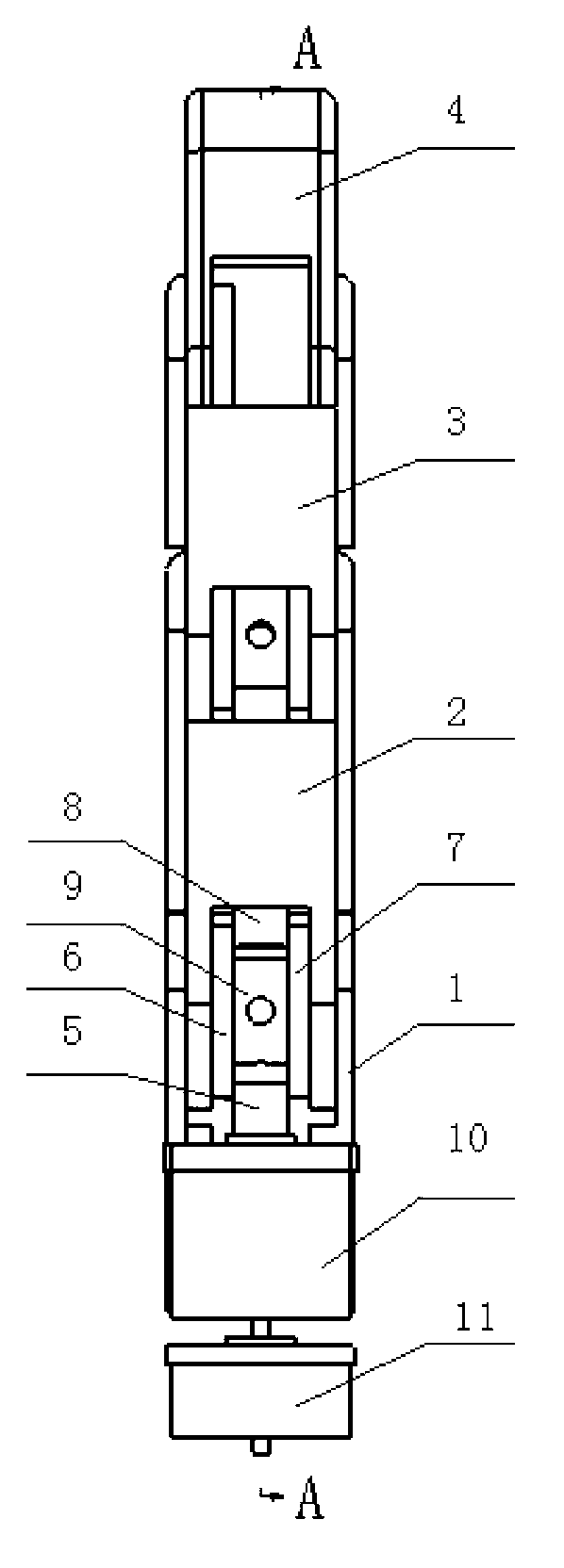
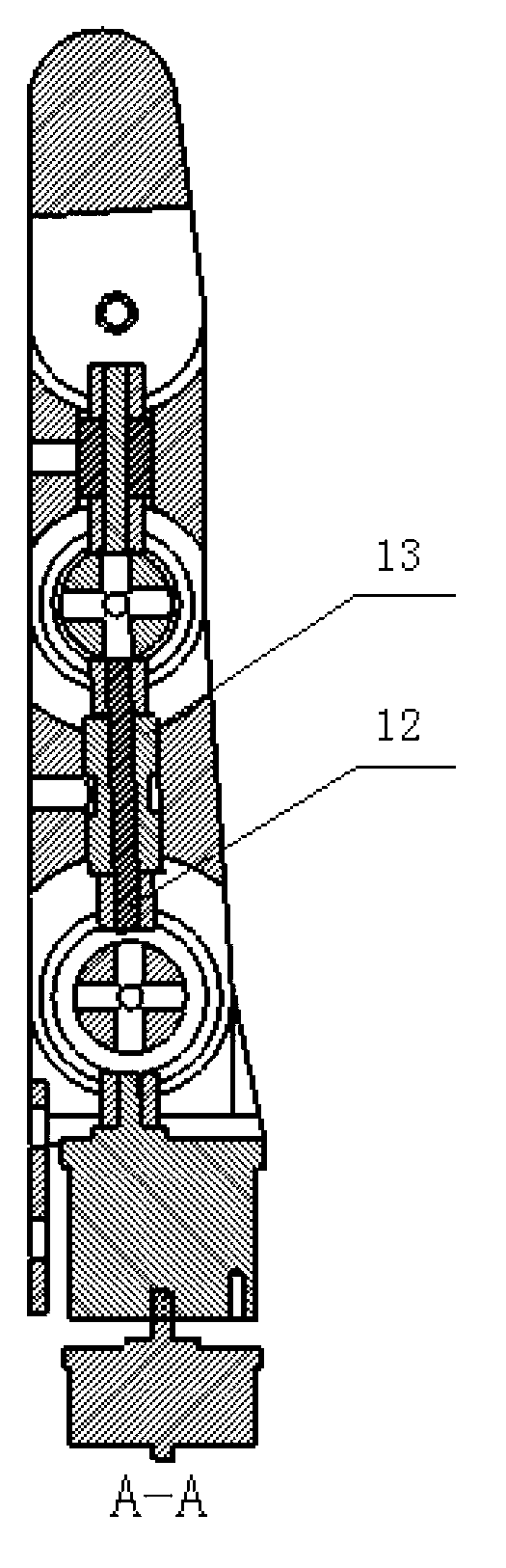
[0021] see figure 1 , a humanoid hand device of an under-actuated exquisite transmission mechanism, generally composed of a palm (14), a thumb (15), an index finger (16), a middle finger (17), a ring finger (18), and a little finger (19); wherein The fingers include the first phalanx (1), the second phalanx (2), the third phalanx (3), the fourth phalanx (4), the first-stage cylindrical gear (5), the movable crown gear (6), Fixed crown gear (7), secondary cylindrical gear (8), cylindrical gear transmission shaft (12), crown gear connecting shaft (9), motor (11), reducer (10) and joint positioning column (13). A reducer (10) is fixed on the first knuckle (1), and a motor (11) is connected to the lower side of the reducer (10). At the same time, the reducer is connected to a primary cylindrical ge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More