

Method applied to unmanned aerial vehicle for improving navigation calculating precision
A technology of navigation calculation and unmanned aerial vehicles, which is applied in the field of improving the accuracy of navigation calculation, to achieve the effect of satisfying precise guidance, improving calculation accuracy and reducing truncation error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The description will be described in detail below in conjunction with the accompanying drawings and embodiments.
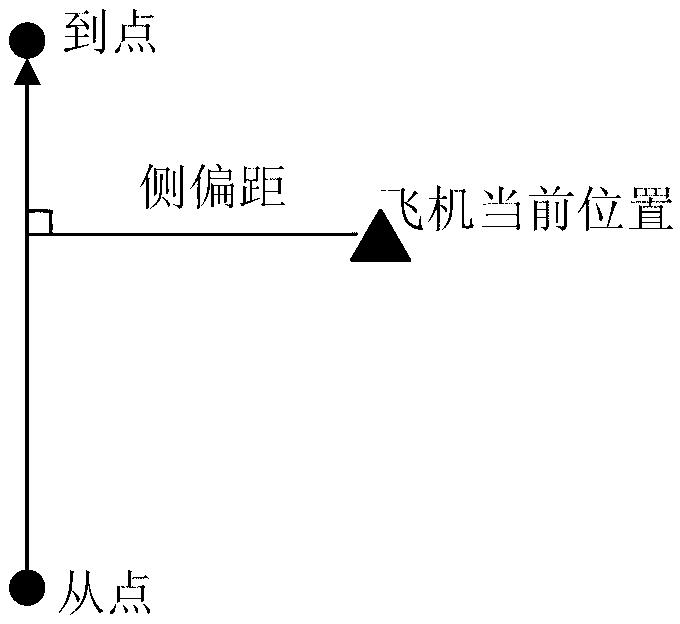
[0029] The flight route of the UAV is connected by several waypoints. When the UAV flies from the waypoint m to the waypoint n, it is said that the UAV is flying on the flight segment m→n, and the waypoint m is the current UAV. The starting point of , waypoint n is the arrival point of the current UAV. Such as figure 1 As shown, the from point and the to point are the projections of the current drone's from point and to point on the horizontal plane, then the vertical distance between the projection of the current aircraft position on the horizontal plane and the line from point → to point is called the lateral deviation The side offset is positive when the aircraft is on the right side of the flight path.
[0030] The general navigation solution method includes a large number of trigonometric and inverse trigonometric operations. The existing TMS320 seri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More