

Six degrees of freedom position and attitude determination method based on landmark navigation
A technology for determining methods and degrees of freedom, applied in road network navigators, surveying and navigation, measuring devices, etc., can solve problems such as low accuracy and poor applicability, and achieve the effect of improving solution accuracy and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] In order to better illustrate the purpose and advantages of the present invention, the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
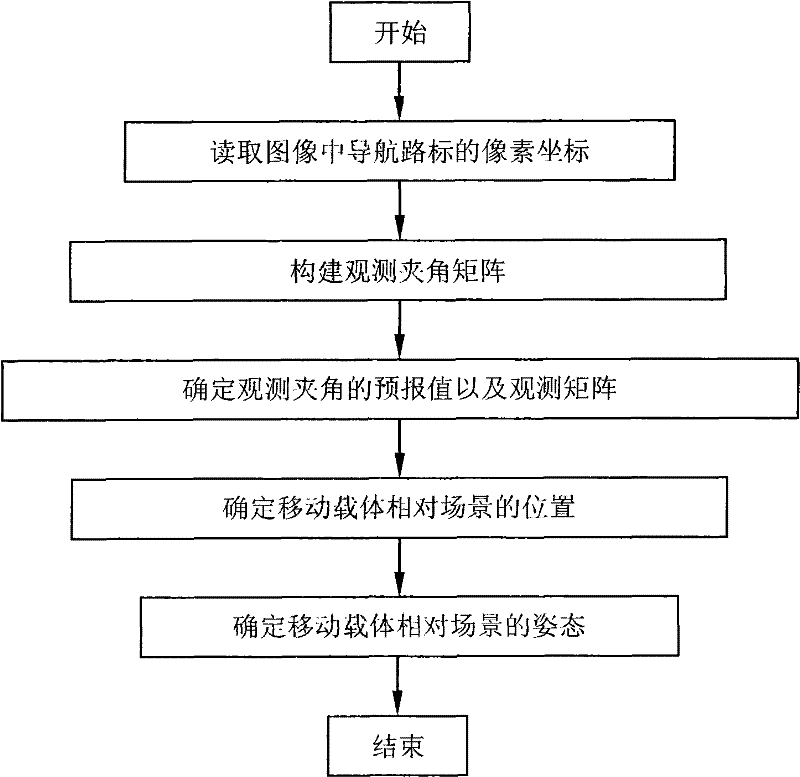
[0062] The concrete steps of this embodiment are as follows:
[0063] Step 1, read the pixel coordinates of the navigation landmarks in the image captured by the optical camera
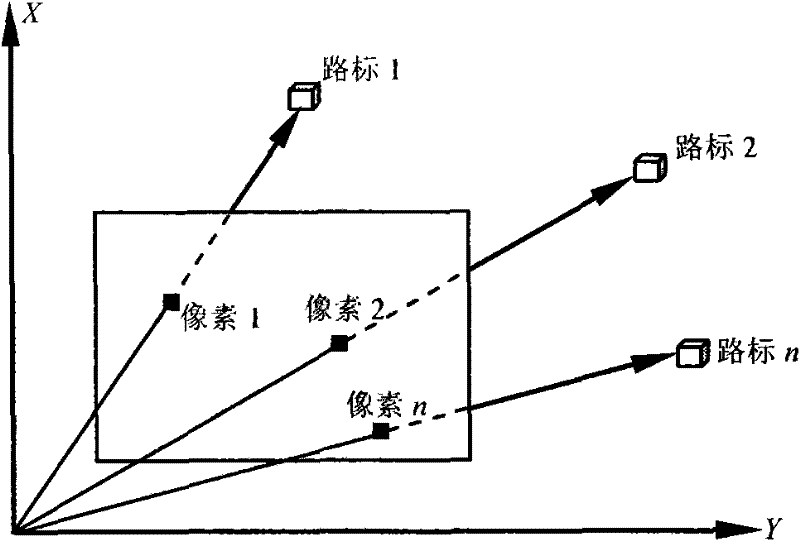
[0064] The mobile carrier can use its optical camera to image the navigation landmarks in the scene. By extracting the pixel and image line coordinates of the navigation landmarks in the image, the pointing direction of the navigation landmarks in the mobile carrier coordinate system can be obtained. The imaging relationship of the navigation landmarks is as follows: figure 2 shown.
[0065] In the scene coordinate system, the position vector of the i-th navigation landmark is The prior estimation value and transformation matrix of the position vector of the mobile carrier camera coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More