

Planning method of intelligent vehicle autonomous running dynamic trajectory and system of the same
A technology for intelligent vehicles and autonomous driving, which is applied in the traffic control system of road vehicles, traffic control systems, special data processing applications, etc., and can solve problems such as poor portability, lack of consideration of vehicle dynamics characteristics, and vehicle constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
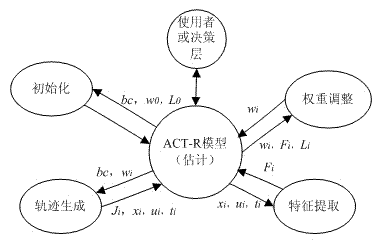
[0034] Such as figure 1 As shown, the idea of the present invention is: the trajectory planning problem P 0 Defined as {D,{O},H 0 ,S 0 , bc}. Scope D refers to the system dynamics and the parameterized weight function J that needs to be minimized; {O} refers to the collection of obstacles in the environment; H 0 is a hard constraint on the state space, S 0 is the soft constraint condition that reflects the user's intention; the boundary condition bc={t 0 ,x 0 ,x f}, is the optimal control state, t 0 is the initial time, x 0 is the starting position, x f for the end position. The goal is to find the optimal solution X = {J n , L n ,x n ,u n ,t n}, where J n Denotes the weight solution, L n Represents the constraints of trajectory features, {x n ,u n ,t n} represents the trajectory to be executed (x n Indicates the position and vel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More