

Variable rigidity parallel joint snake-shaped robot mechanism
A snake-like robot with variable stiffness technology, applied in the field of robot research and engineering, to achieve high load-carrying capacity, overcome posture instability, and strong deflection moment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
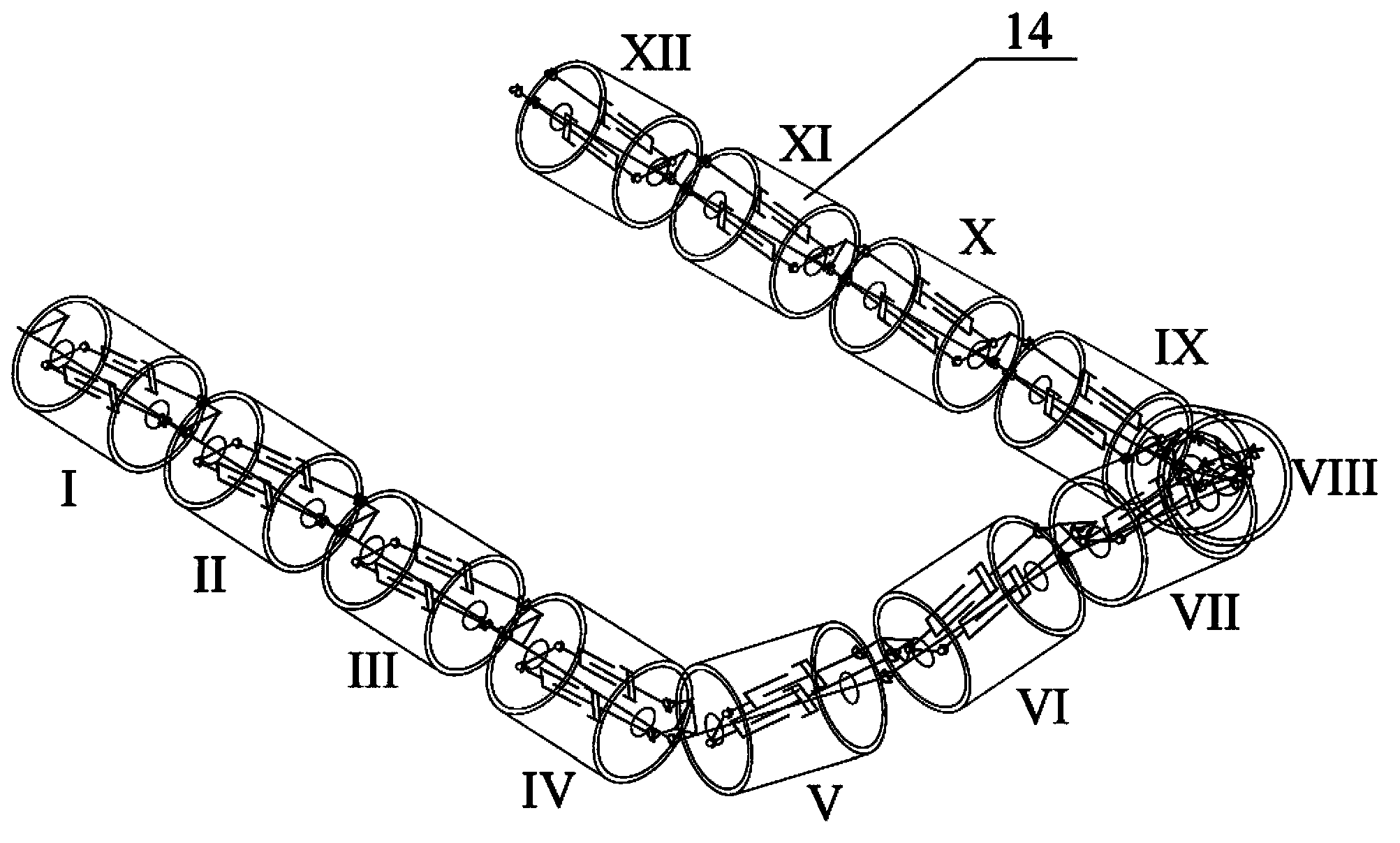
[0036] see figure 1 As shown, the variable stiffness parallel joint snake robot mechanism provided by the present invention is composed of a plurality of identical motion units 14 connected in series; adjacent motion units 14 are connected by a two-degree-of-freedom space parallel mechanism; Each movement unit is numbered, respectively numbered as XII, XI, X, IX, VIII, VII, VI, V, IV, III, II, I; the movement state shown in the figure is U-shaped wheel movement, XII, XI, X , IX and I, II, III, IV motion units are in contact with the ground, the variable stiffness linear drives of these motion units output a small stiffness, reflecting the damping and vibration reduction function; V, VI, VII, VIII motion units are lifted off the ground .
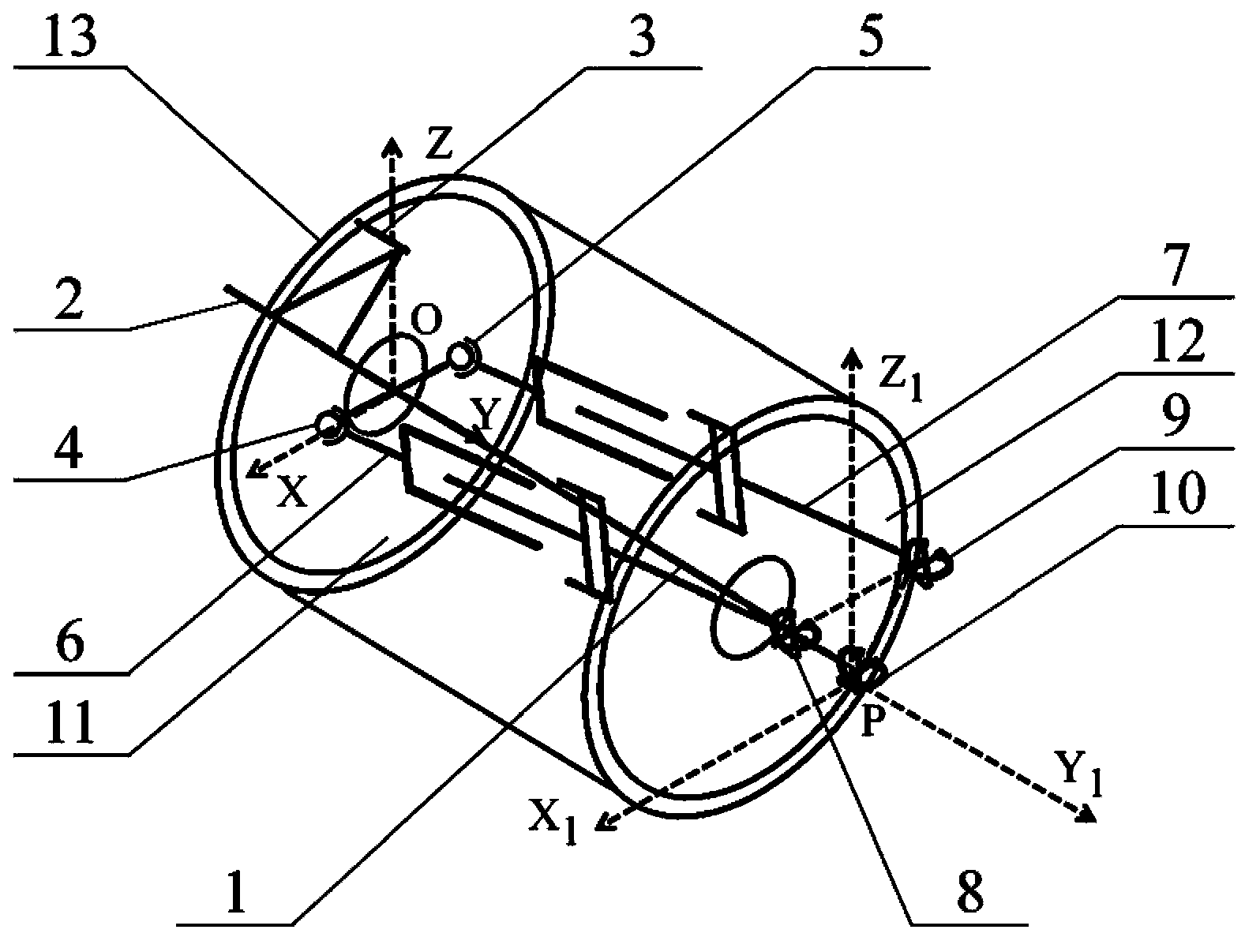
[0037] see figure 2 , Schematic diagram of the motion unit mechanism. The motion unit is composed of four major parts: fixed U ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More