Foot structure of humanoid robot based on modularized array sensor
A technology of array sensors and humanoid robots, which is applied in the field of foot structure of humanoid robots based on modular array sensors, can solve the problems of limitations, lack of perception ability of feet, and weak controllability, etc., and achieve the effect of compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
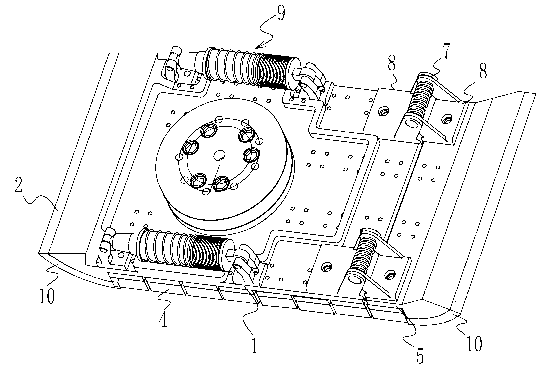
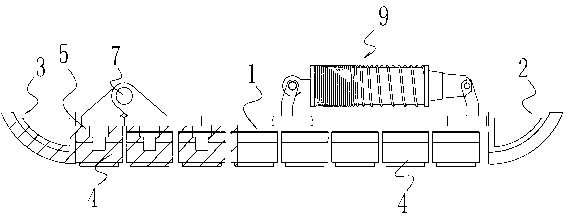
[0024] The present invention comprises sole 1, rear sole 2 fixed on the rear end of sole 1, forefoot 3 that is connected with sole connector and sole 1 and can rotate, and rear sole 2 and sole 3 bottoms of the sole are all provided with rubber shock-absorbing layer 10. A sensor array composed of several sensors 4 for sensing ground reaction force information is fixed on the bottom of the footboard 1 , and the footboard 1 is provided with connecting components for connecting with the robot legs.
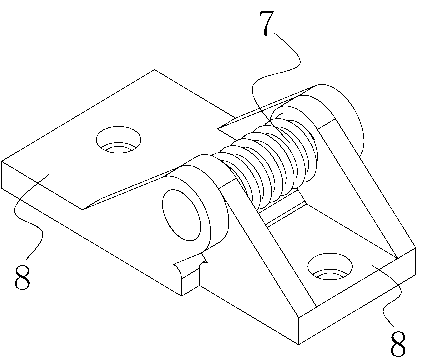
[0025] Wherein, rear sole 2 is provided with a connecting plate 5, and one end of above-mentioned sole connecting piece is fixed with connecting plate 5, and the other end is fixed with foot plate 1; Foot connecting piece comprises a torsion spring 7, and the fixing plate that is fixed on torsion spring 7 two ends 8. The screws pass through one of the fixing plates 8 and the connecting plate 5 in order to fix them together; the screws pass through the other fixing plate 8 and the foot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More