Integrated navigation method based on non-linear mapping self-adaptive hybrid Kalman/H infinite filters
A nonlinear mapping and hybrid filter technology, applied in the field of vehicle navigation, can solve the problems of low precision, strong conservatism, divergence, etc., and achieve the effect of high filtering accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
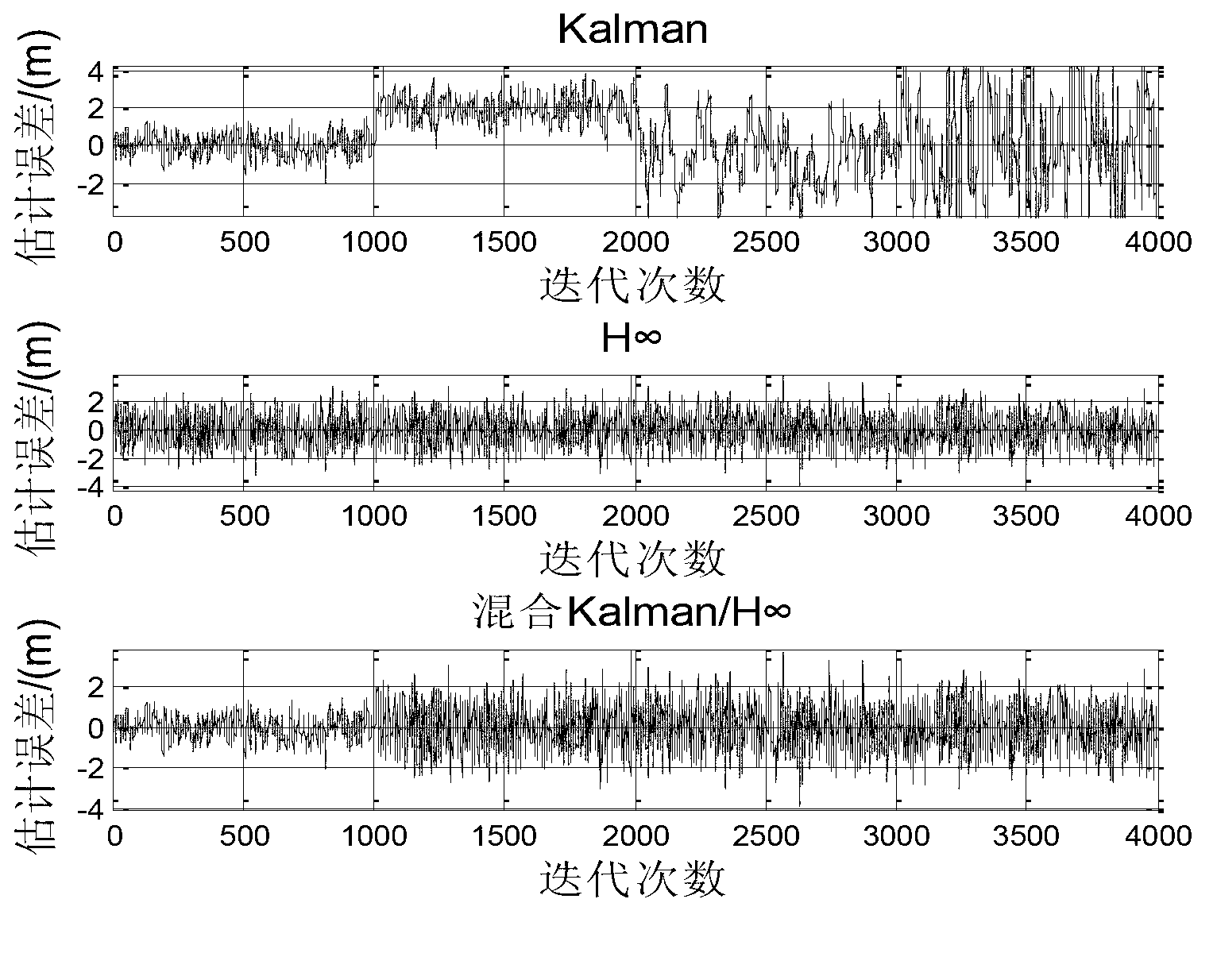
[0069] Embodiment: In vehicle navigation systems, odometers are generally used as distance sensors, gyroscopes are used to form heading sensors, and satellite navigation terminals such as GPS or Beidou users are used as auxiliary sensors to form GPS / DR or Beidou / DR integrated navigation systems. When the integrated navigation system model is established, the model error of the integrated navigation system will lead to the performance degradation of the traditional integrated navigation system based on the Kalman filtering method and the H∞ filtering method, but the method of the present invention can obtain more superior performance. The advantages of the present invention are illustrated below with specific implementation examples. details as follows:
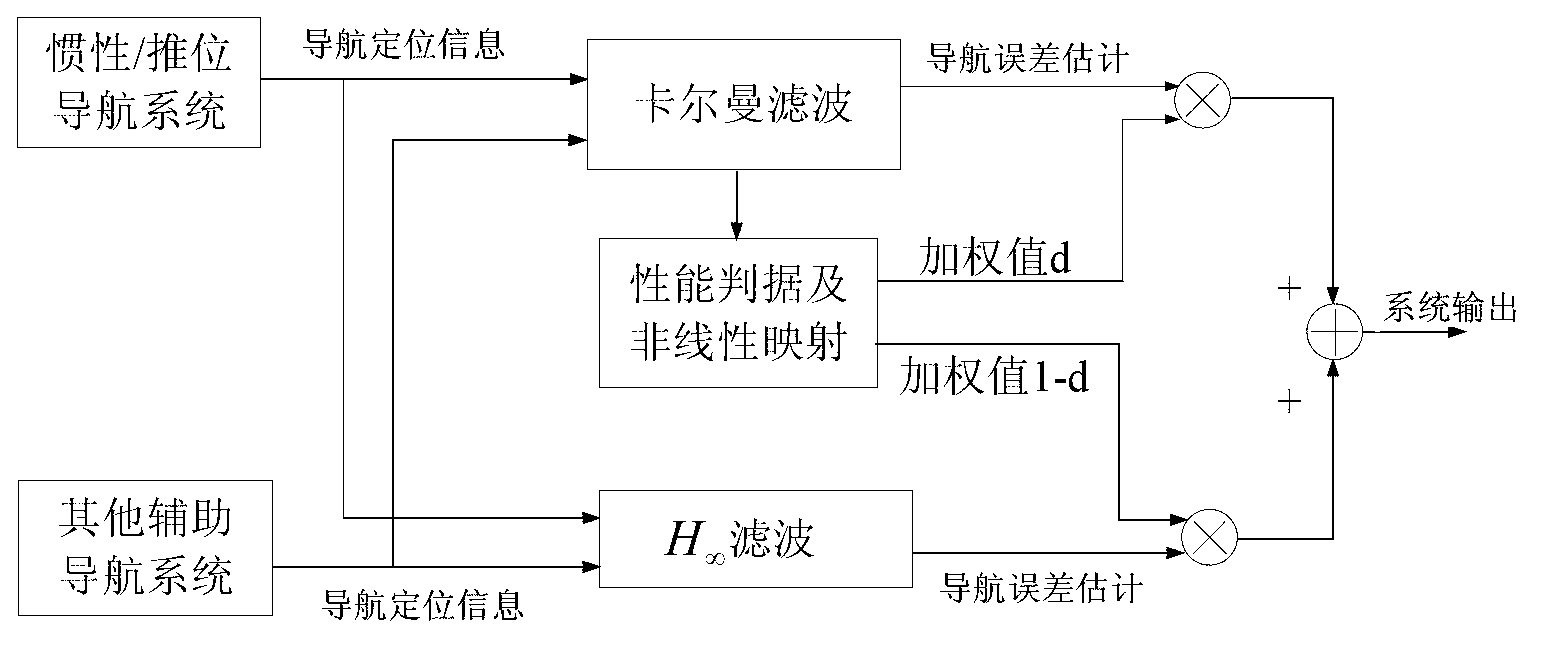
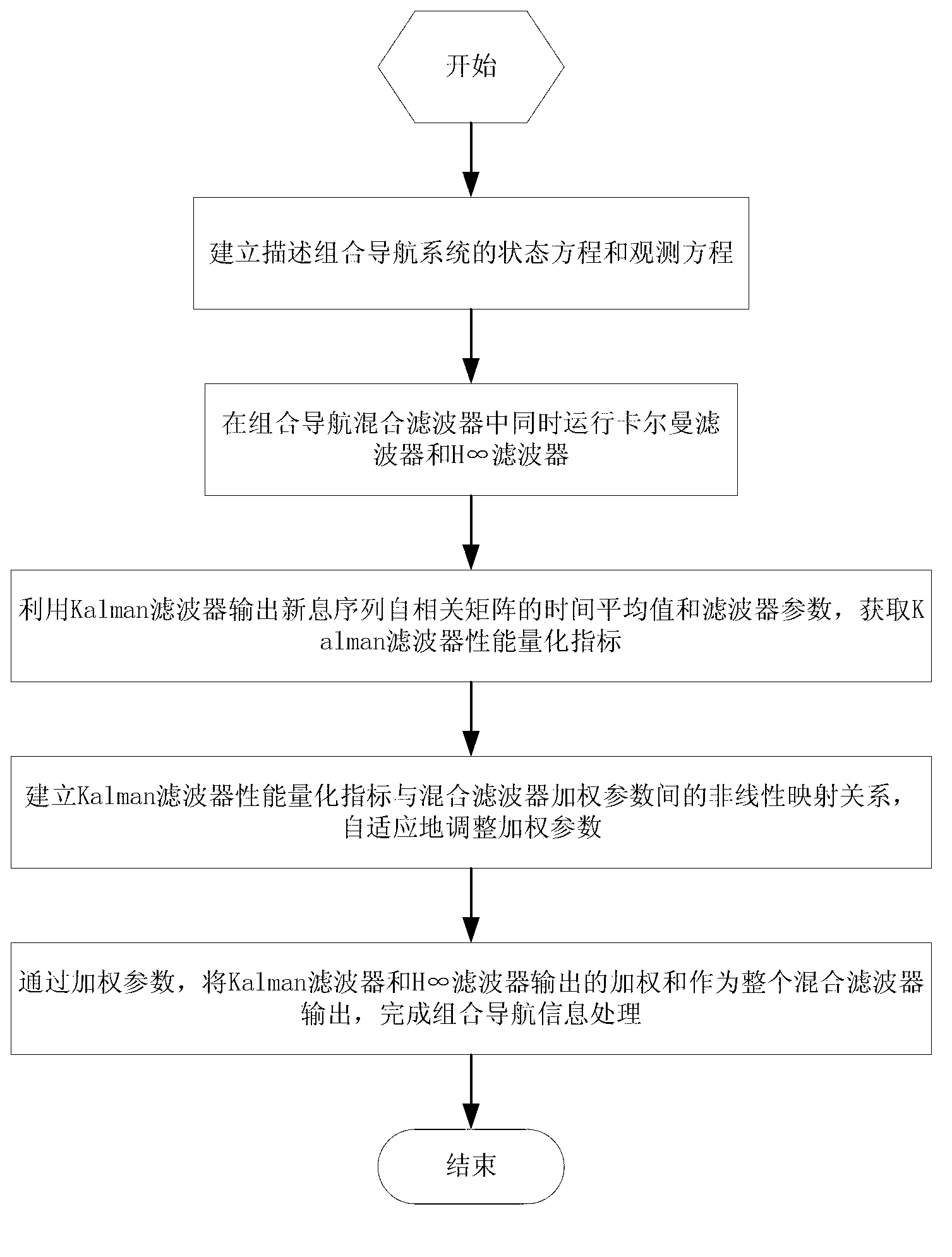
[0070] Step 1: In the integrated navigation hybrid filter, establish the state equation and observation equation describing the integrated navigation system.
[0071] The dead reckoning (DR) system position error and velocity...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com