

Intelligent glass cleaning robot based on foot climbing wall
A technology for cleaning robots and intelligent glass, applied in the field of intelligent robots, can solve the problems of low efficiency and insecurity of manual glass cleaning, and achieve the effect of flexible and stable walking mode, fast speed and improved efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
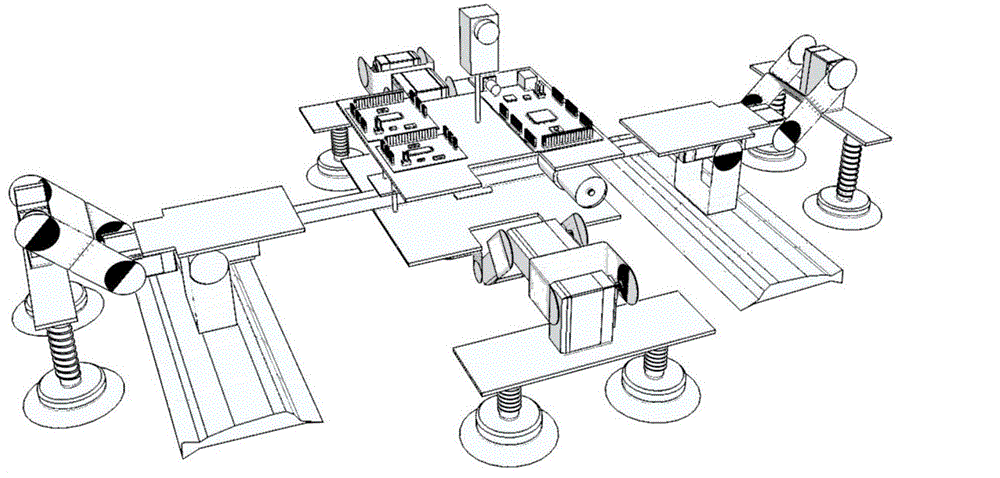
[0029] The intelligent glass cleaning robot based on footed wall climbing of the present invention includes a robot main body, a walking unit, an adsorption unit, a drive unit, a body control unit, an image recognition unit, a wireless control unit and a cleaning unit.
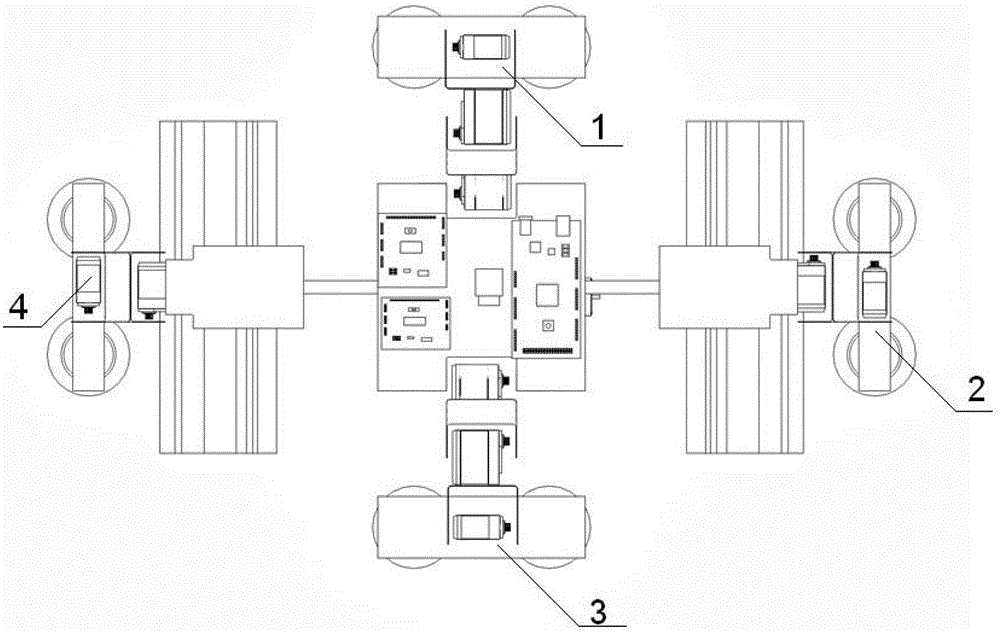
[0030] Such as figure 1 , 2 As shown, the walking unit includes four mechanical feet, two of which are horizontal mechanical feet 2 and 4, and each horizontal mechanical foot is composed of two steering gears, which are installed at both ends of the gear rod; The other two are vertical mechanical feet 1 and 3, and each vertical mechanical foot is composed of 3 steering gears, which are installed at the upper and lower ends of the robot main body. The number of servos on the mechanical feet can vary according to the volume and weight of the body.
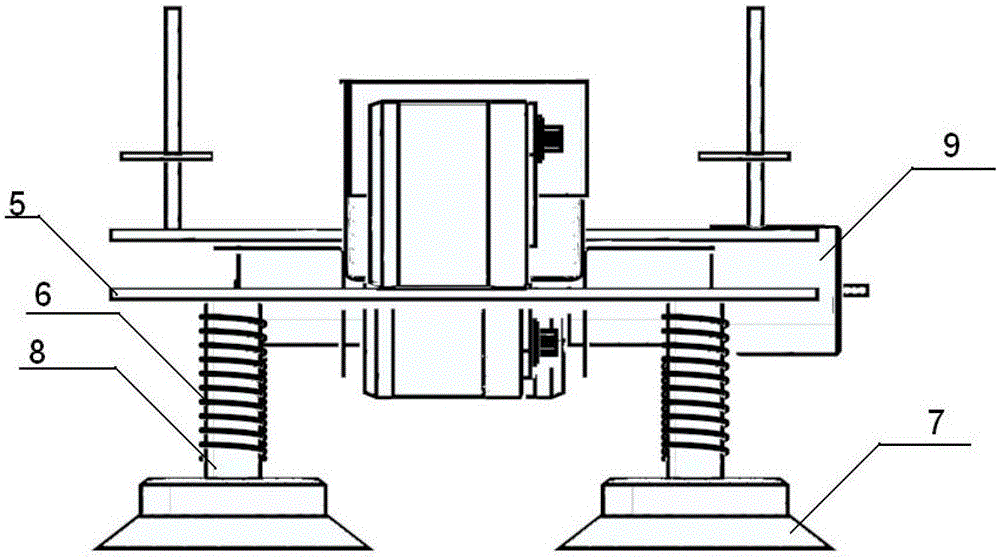
[0031] There are four adsorption units. Such as image 3 As shown, each adsorption unit includes a connecting plate 5, 2 fittings 6, 2 non-slip suction cups 7, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More