

Gait phase distinguishing method based on lower limb joint movement information
A phase discrimination and joint motion technology, applied in medical science, sensors, diagnostic recording/measurement, etc., can solve the problems of poor real-time performance, complex system installation, large amount of calculation, etc., to achieve simple structure, reduce complexity, reduce effect of difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
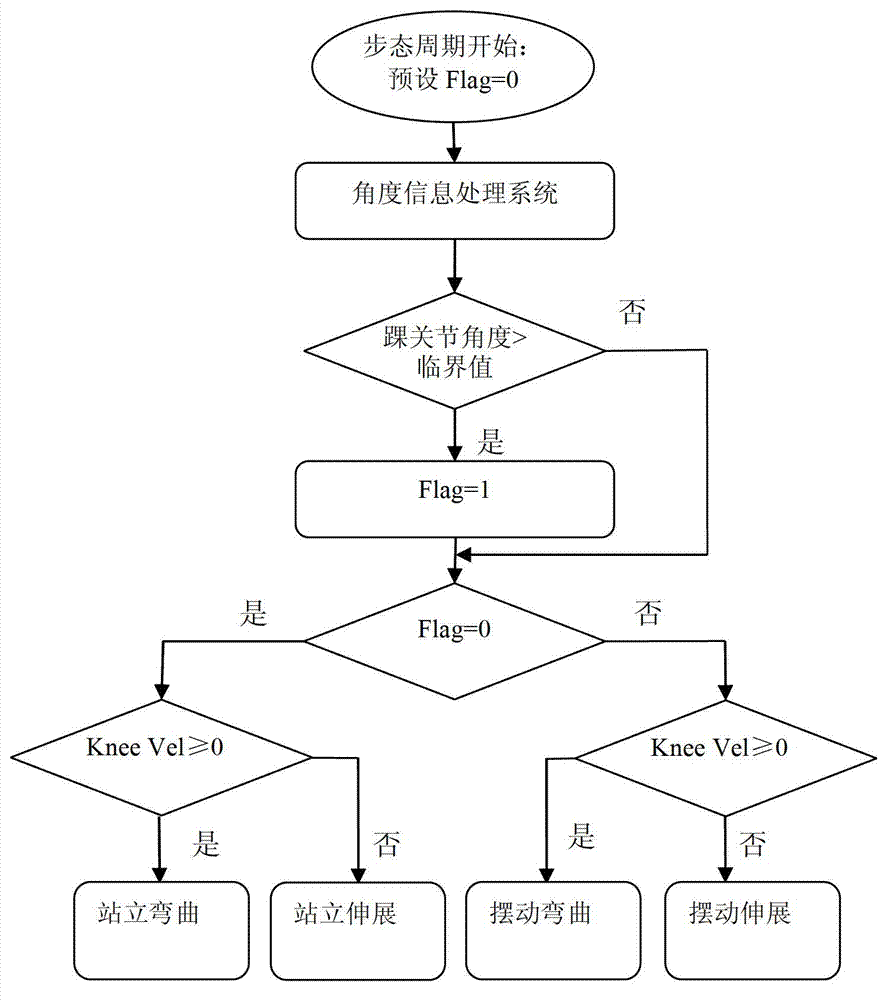
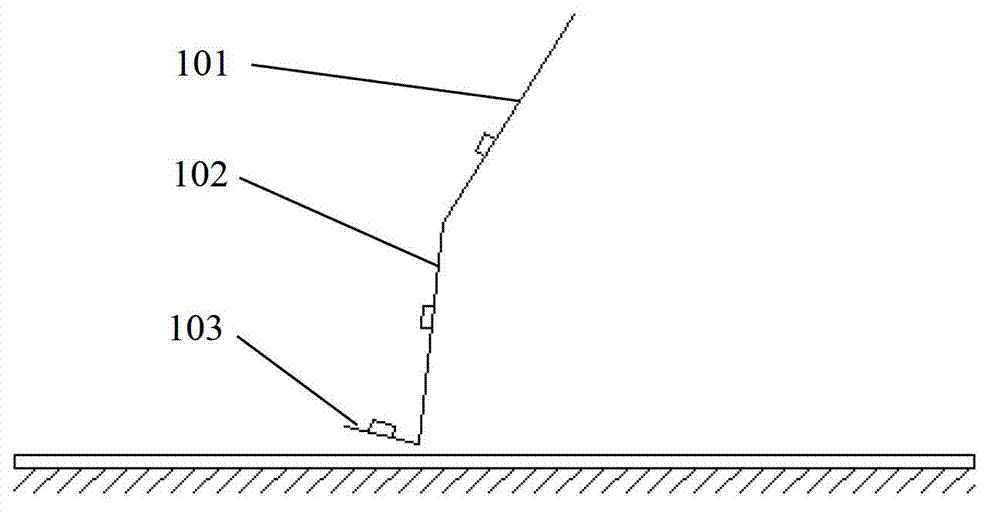
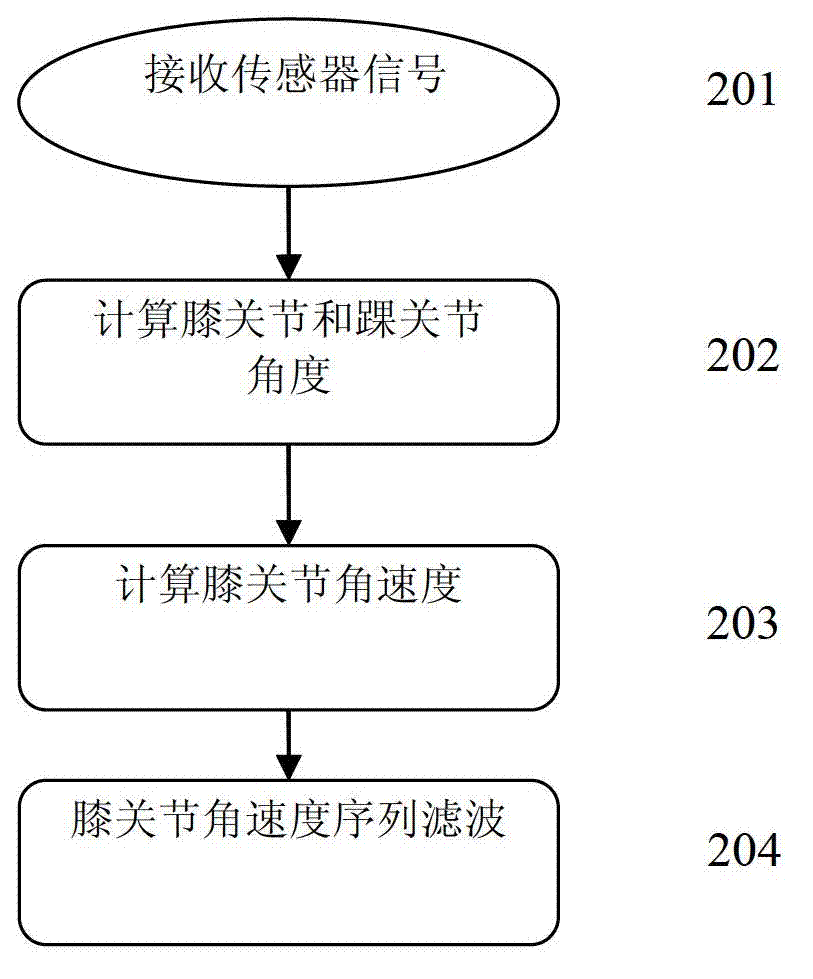
[0034] The invention discloses a gait phase discrimination method based on lower limb joint motion information. The knee joint phase discrimination method collects angle information through three angle sensors installed on the thigh, calf and instep surface to complete the gait phase judgment of the lower limbs , reducing the number and types of sensors worn by patients with lower extremity amputations, and the structure is simple, making the prosthesis more convenient and comfortable to wear.
[0035] The technical solutions in the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More