

Position Feedback Master Hand System of Live Repair Robot
A robot, master-hand technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the limitation of robot operation content and operation efficiency, the inability of the operator to perceive the working environment, and the inability to achieve master-slave control, so as to improve the operation Efficiency, increased flexibility, easy wiring effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
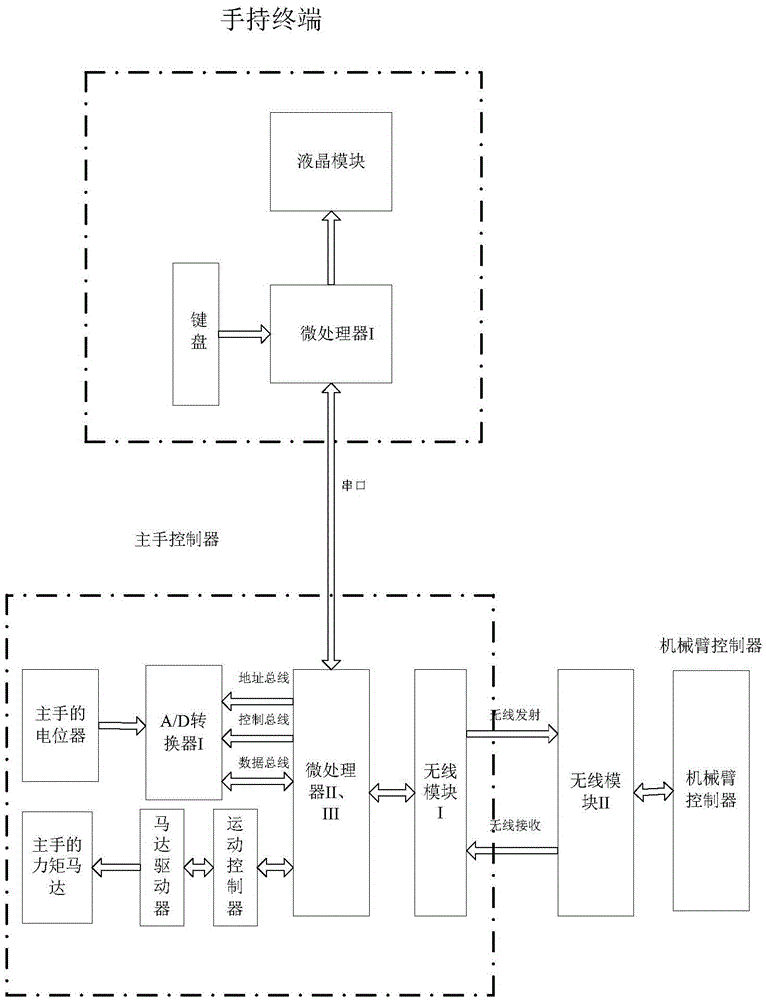
[0042] figure 1 Among them, a live repair robot position feedback main hand system, its handheld terminal includes a microprocessor I, which is connected to the keyboard, LCD screen and the main hand controller respectively; the main hand controller uses a DSP chip, including a microprocessor II And the microprocessor III, the microprocessor II is connected with the microprocessor I and the dual-port RAM respectively, and the dual-port RAM is connected with the microprocessor III; the microprocessor III is connected with the motion controller respectively, and the motion controller is connected with the motor driver , the motor driver is connected with the torque motor 2 of the main hand; the A / D converter I is connected with several potentiometers (at each joint movement axis) of the main hand, and the microprocessor II is connected with the A / D conver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More