

Mixed robot dynamic path planning method
A dynamic path and robot technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of non-optimized path, slow calculation speed, difficult to deal with dynamic obstacles, etc., and achieve the effect of strong flexibility and path optimization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The purpose and effects of the present invention will become more apparent by describing the present invention in detail below in conjunction with the accompanying drawings.
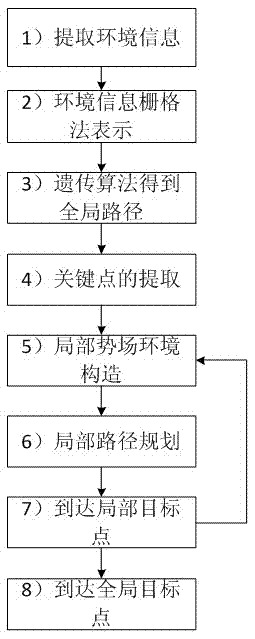
[0019] like figure 1 As shown, the hybrid robot dynamic path planning method of the present invention comprises the following steps:
[0020] Step 1: Use the visual sensor to obtain environmental information, including known static obstacle information in the environment, target point information, and the position information of the robot itself.
[0021] This step can use the method in Chapter 3 of Liu Mingshuo. Flexible Manipulator Trajectory Tracking Based on Binocular Vision Odometry. Dissertation of Zhejiang University. 2011.04 to obtain the position information of the obstacle and the position of the robot itself.
[0022] Step 2: The environmental information obtained in step 1 is represented by the grid method to obtain a grid map, and the size of the grid depends on the planning accuracy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More