

Mobile robot and control method thereof based on predesigned move path
A mobile robot and motion path technology, applied in the field of robotics, can solve problems such as low operating efficiency, complex algorithms, and path deviation, and achieve the effects of no wiring, simple operation, and stable performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
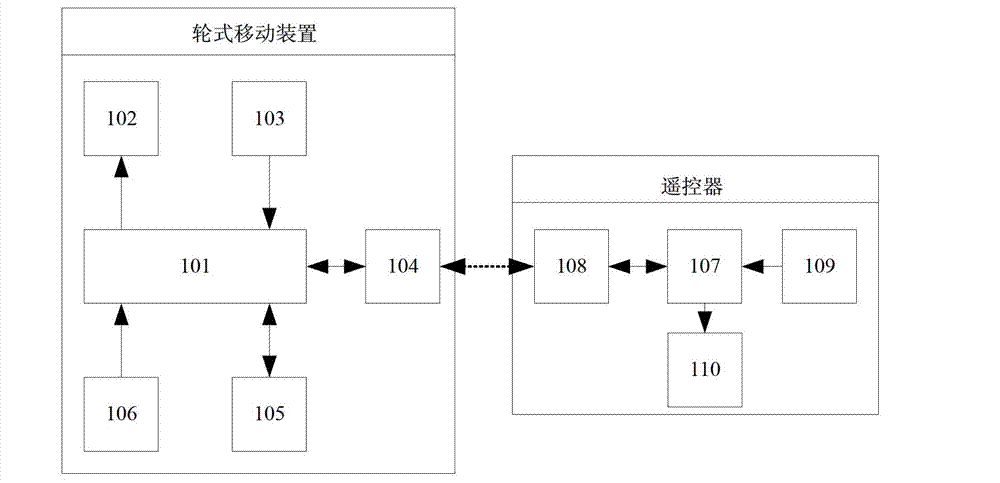
[0014] figure 1 Among them, 101 is the microprocessor A of the wheeled mobile device; 102 is the motor drive circuit; 103 is the electronic compass; 104 is the wireless transceiver A of the wheeled mobile device; 105 is the memory; 106 is the ultrasonic obstacle avoidance sensor; 107 is Microprocessor B of the remote controller; 108 is the wireless transceiver B of the remote controller; 109 is a keyboard; 110 is an LCD display. The microprocessor A (101) is respectively connected with the motor drive circuit (102), the electronic compass (103), the wireless transceiver A (104), the memory (105) and the ultrasonic obstacle avoidance sensor (106). Microprocessor B (107) is connected with wireless transceiver B (108), keyboard (109) and LCD display screen (110) respectively. Wireless transceiver A (104) and wireless transceiver B (108) are con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More